

A segmented multi-degree-of-freedom soft actuator for human wrist rehabilitation training
A rehabilitation training and actuator technology, applied in passive exercise equipment, physical therapy, etc., can solve the problem that the range of motion of the actuator is too small to apply rehabilitation exoskeleton, and achieve a wide range of motion, high bending efficiency, and large effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] In order to make the objectives, technical solutions and advantages of the present invention, the present invention will be described in further detail below with reference to the accompanying drawings and examples. It should be understood that the specific embodiments described herein are merely intended to illustrate the invention and are not intended to limit the invention. Further, the technical features according to each of the various embodiments described below can be combined with each other as long as they do not constitute a collision between each other.
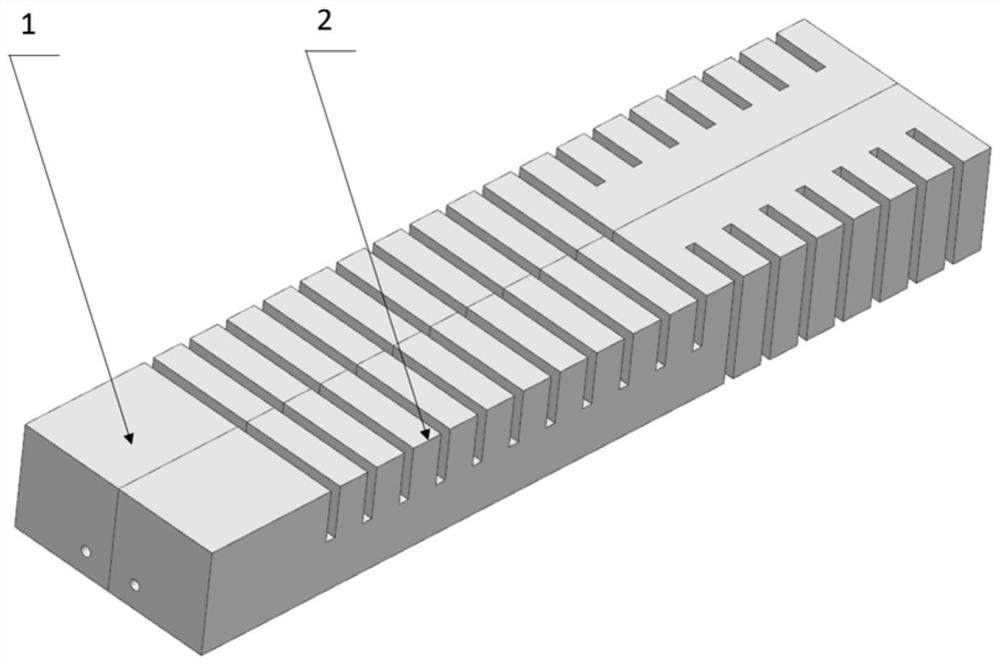
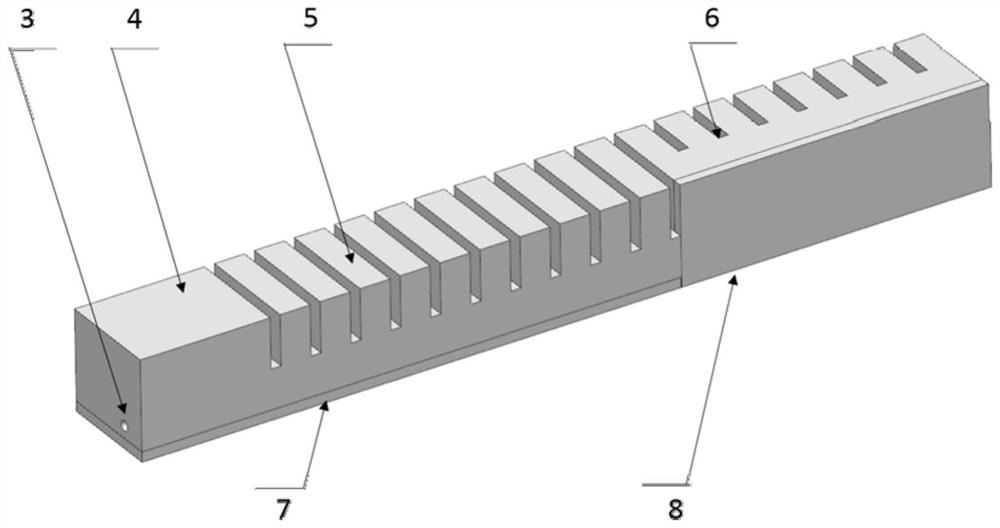
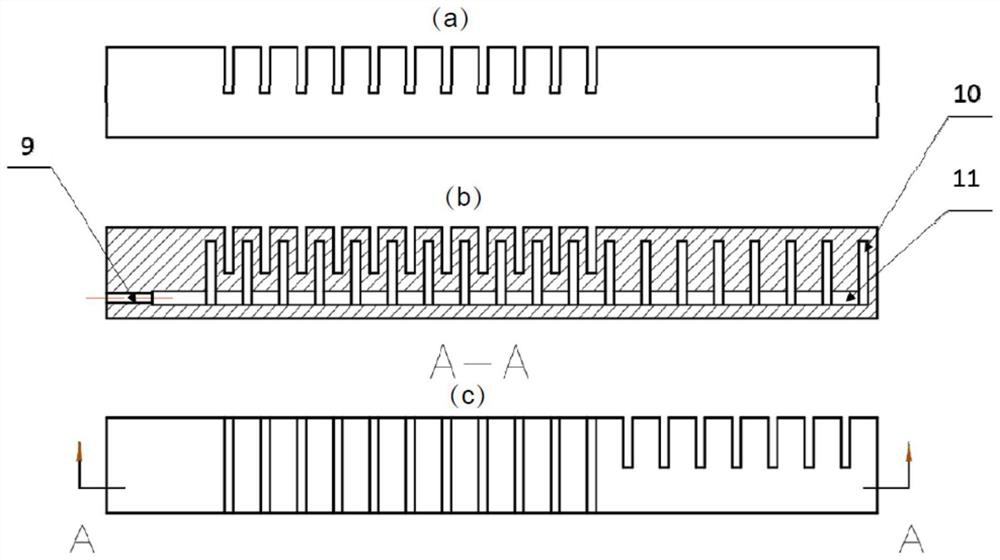
[0029] The present invention provides a segmented multi-DOF software for personal wrist rehabilitation actuator, taking into account the human wrist includes eight carpal, wrist joint and carpal joint in two major joints; radiocarpal joint is located carpal bone between the distal and proximal radius, at the distal wrist joint is the wrist joint, the carpal connected proximal and distal ends. These two joints ca...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More