

Graphical programming method for robot interaction based on tiles
A graphical programming and robot technology, applied in the field of graphical programming of robot interaction, can solve problems that are not suitable for the promotion of interactive applications for non-professional users, achieve intuitive and accessible programming, save time for dragging programming, and enhance readability sexual effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment 1
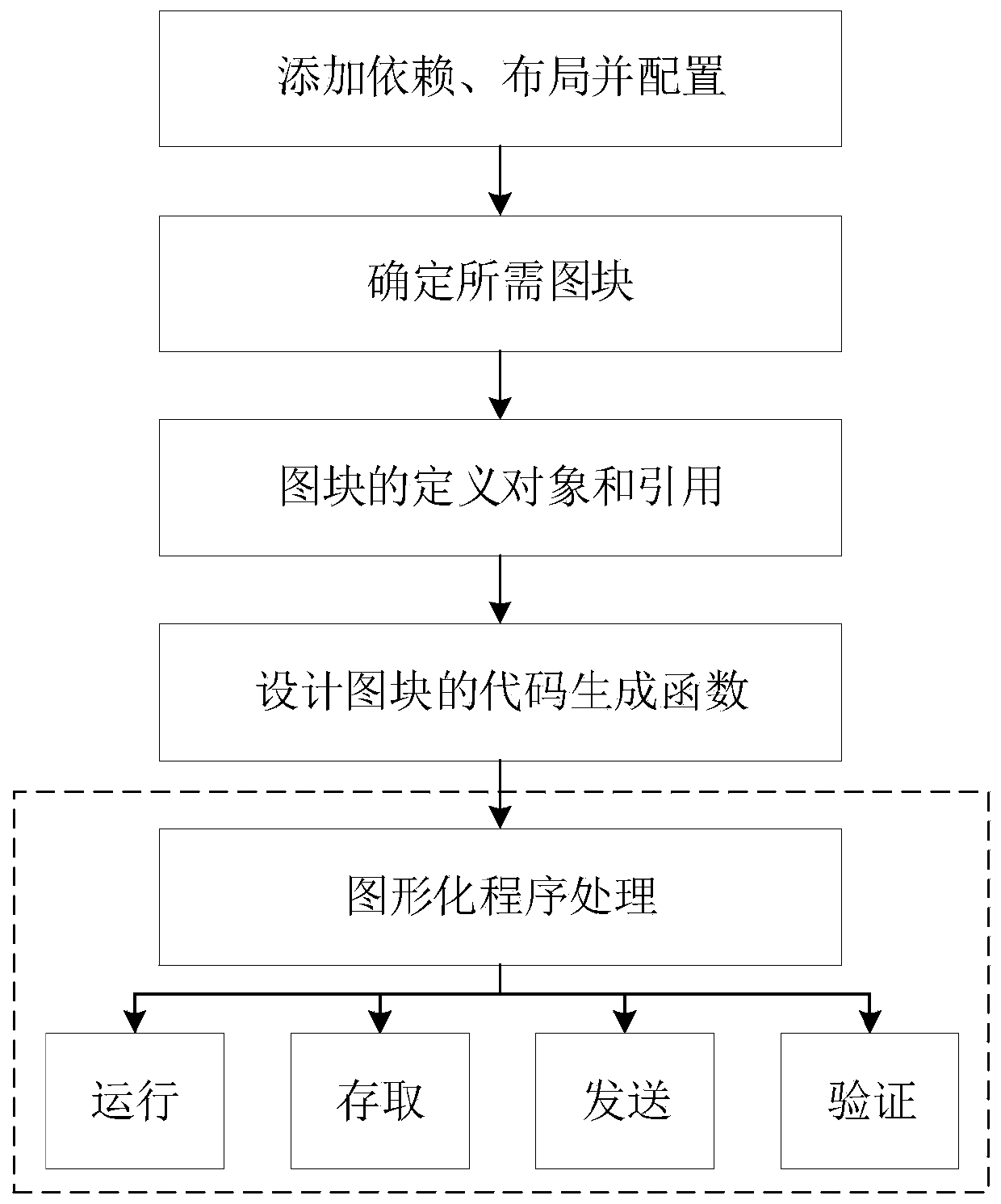
[0045] according to figure 1 As shown, the present invention provides a graphical programming method for robot interaction based on blocks,
[0046] A block-based graphical programming method for robot interaction, comprising the following steps:
[0047] Step 1: Add the Blockly dependency library to the web page source code, and perform page layout and configuration;
[0048] The step 1 is specifically: adding Blockly dependency library in the web page source code, determining the web page through the html file, carrying out custom data marking and setting through the XML extended markup language, adopting the title in the head in the html to determine the title of the page, Use the link cascading style sheet in html, use the css file in html to assist in the layout of the page, use script to refer to the basic dependent script of the page; use div or table tags in html for page layout and configuration;
[0049] Through the sub-area set by div, similar settings are made in...
specific Embodiment 2
[0075] What this implementation method describes is a graphical programming method based on blocks, including the following steps:
[0076] Step 1. Add the Blockly dependency library to the source code of the web page and perform page layout and configuration;
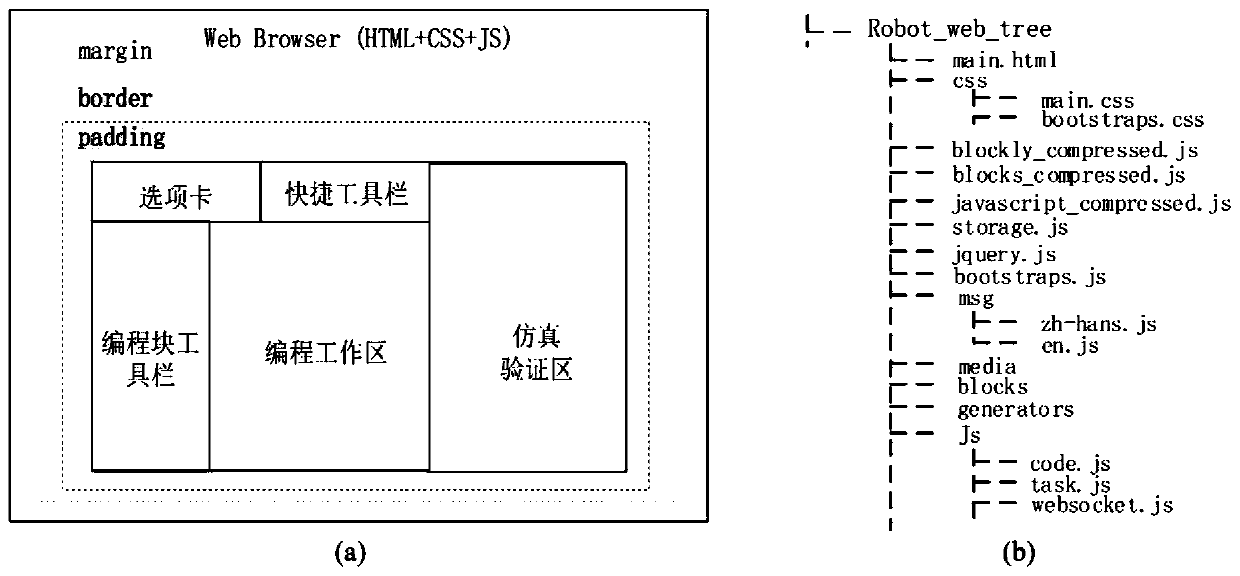
[0077] Based on the dynamic language JavaScript design, draggable tiles rely on Blockly design. Blockly is an open source web page drag block editor developed based on JavaScript. Each block is the basic unit of the program and can be combined and interlocked in the form of drag and drop. It supports Web, Android, IOS systems and other software environments. Use it to provide support for code generation, and by default support the generation of programming languages such as JavaScript, Python, and PHP. On this basis, this method carries out the professional programming block design oriented to the robot. Such as figure 2 As shown, this method is implemented based on Web design.
[0078] Such as figure 2 As sho...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More