

Game path planning method based on improved potential field grid method
A technology of path planning and grid method, which is applied in the field of game character pathfinding, can solve problems such as unreachable targets, achieve the effect of optimizing path quality and improving operating efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
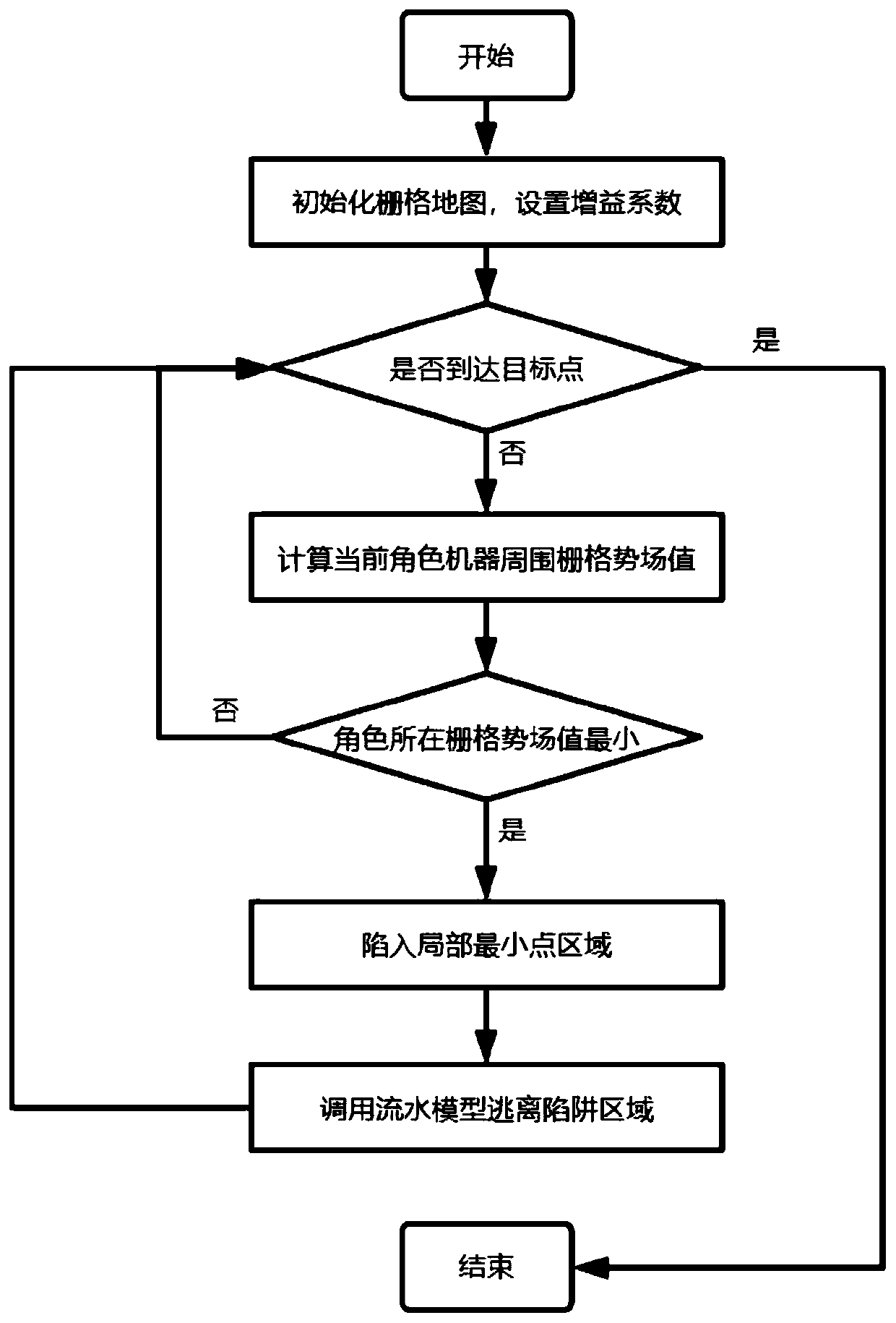
[0037] Example: such as figure 1 As shown, a game path planning method based on the improved potential field grid method includes the following steps:
[0038] S1. Rasterize the game map environment, initialize all grid potential fields to 0, and set the gain coefficients of the gravitational potential field and the repulsive potential field.
[0039] In step 1, the size of the map grid is determined by the player’s character model, and it is required that the entire character can be surrounded by it. It is stipulated that the size of each grid is 1 unit, and the gain coefficients of the gravitational potential field and the repulsive potential field are both set to 10.
[0040] S2. Determine whether the character has reached the target position, and exit path planning if it reaches the target position, otherwise call step 3. Specifically, to determine whether the character has reached the target position, just compare the grid coordinates of the character and the target posi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More