

Multi-ship path planning algorithm for maritime pursuit or rescue
A path planning and algorithm technology, applied in two-dimensional position/course control, vehicle position/route/height control, non-electric variable control, etc., can solve problems such as no processing, failure to catch up, and inability to avoid obstacles , to make full use of the
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The present invention will be described in further detail below in conjunction with the embodiments and the accompanying drawings, but the embodiments of the present invention are not limited thereto.
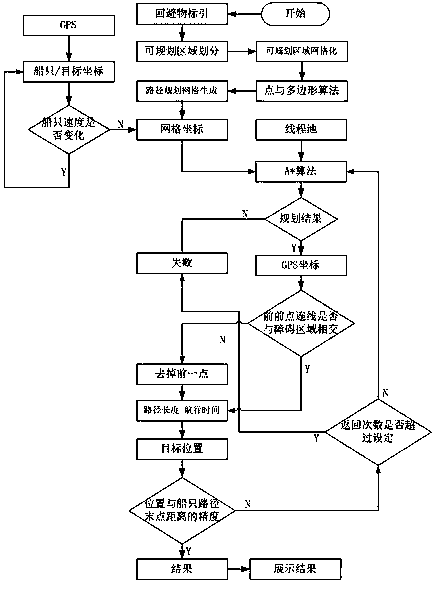
[0032] Such as figure 1 As shown, a multi-vessel path planning algorithm for pursuit or rescue at sea includes the following steps:
[0033] 1) Mark land, islands, shoals, dangerous sea areas and other obstacles that need to be avoided in path planning in the form of closed polygonal areas from maps and sea charts, and record the polygonal area boundary coordinates;
[0034] 2) Divide the boundaries of areas where path planning can be performed on maps and charts;
[0035] 3) Divide the boundary of the area where path planning can be carried out into grids according to a certain precision;
[0036] 4) Use the point and polygon algorithm to traverse each point of the grid to determine whether the point is in the polygon area, that is, the obstacle area;
[0037] 5) Gen...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More