

Novel deformable robot
A robot and a new type of technology, applied in the direction of manipulators, motor vehicles, manufacturing tools, etc., can solve the problems of fixed deformation time and degree, difficult to preset deformation state, and limit the response speed of mobile robots, so as to simplify the deformation mechanism and realize automatic deformation. The effect of lock holding
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
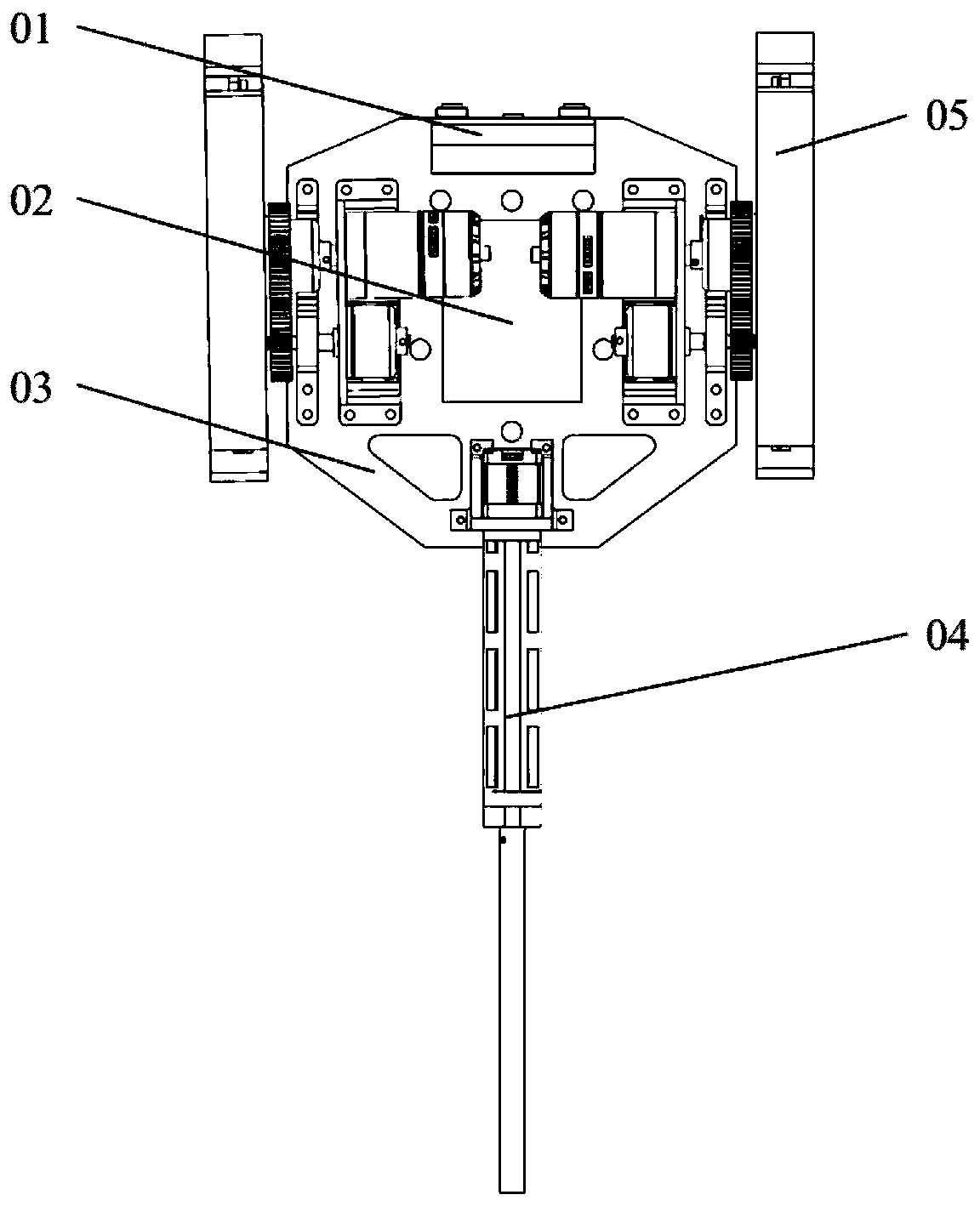
[0019] This embodiment discloses a new type of deformable robot, such as figure 1 As shown, the new deformable robot of the present invention includes a chassis 3 and two deformable wheel legs 5 respectively arranged on both sides of the chassis 3;
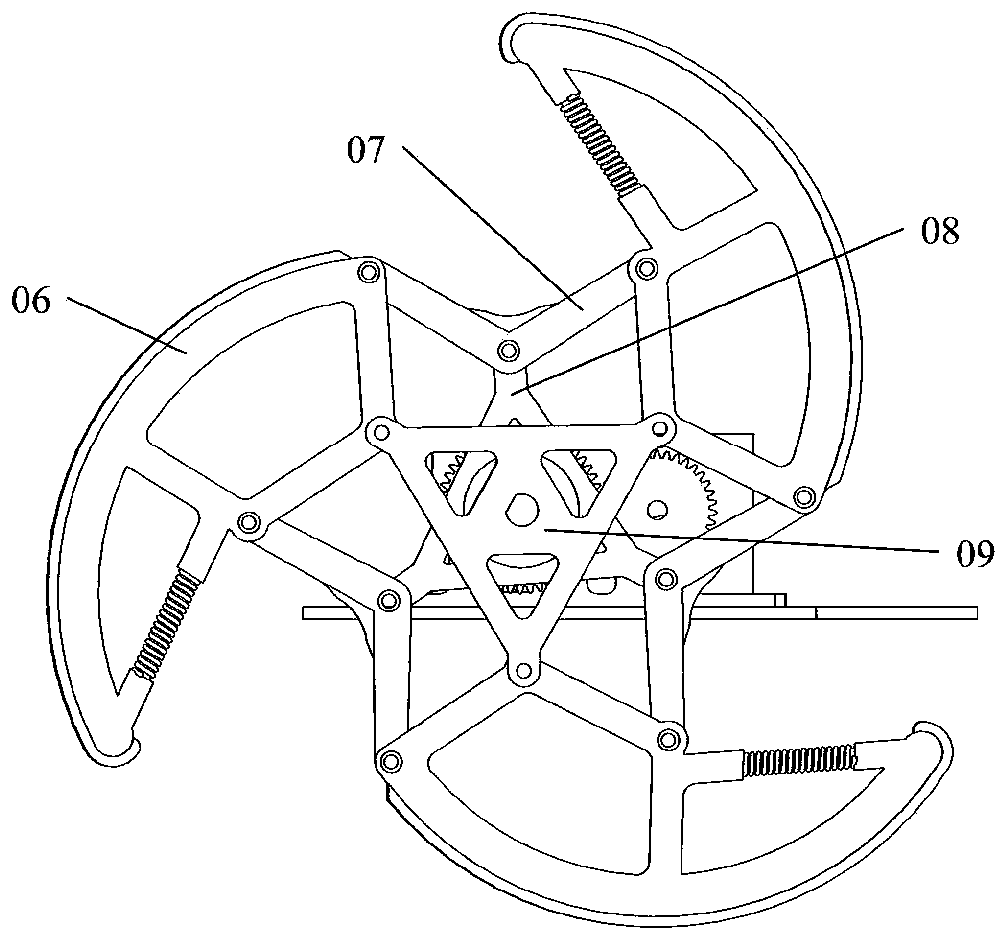
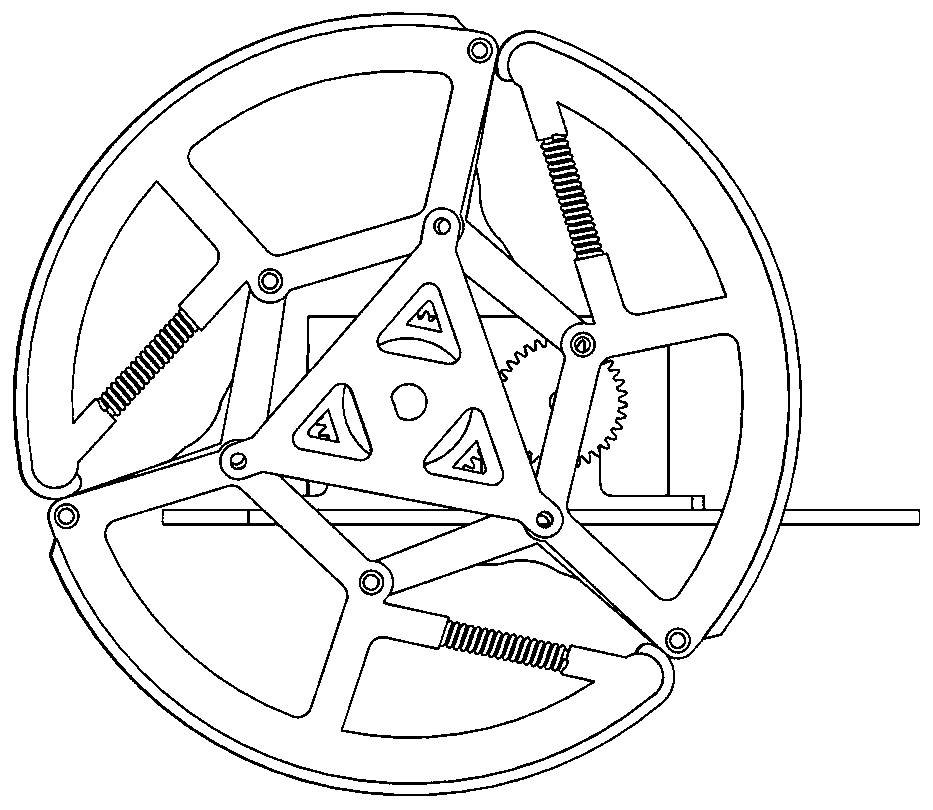
[0020] The deformation wheel leg 5 includes a deformation wheel mechanism and a deformation control mechanism; figure 2 As shown, the deformable wheel mechanism includes outer spokes 9 and inner spokes 8 of equilateral triangle structure and coaxially arranged, three wheel members 6 evenly distributed around the outer spokes 9 and inner spokes 8, and sequentially hinged to adjacent wheels The three connecting members 7 between the members 6; the three wheel members 6 are hinged to the three vertices of the outer spokes 9 one by one; the middle of the three connecting members 7 are hinged to the inner spokes 8 one by one As shown in the figure, the connecting member 7 is a symmetrical member with an included angle of 120°, and the inn...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More