

Local smooth trajectory planning method based on curved column coordinate system
A cylindrical coordinate system and trajectory planning technology, which is applied in control/regulation systems, two-dimensional position/channel control, non-electric variable control, etc., can solve problems such as poor trajectory continuity and smoothness, and difficult trajectory constraints
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
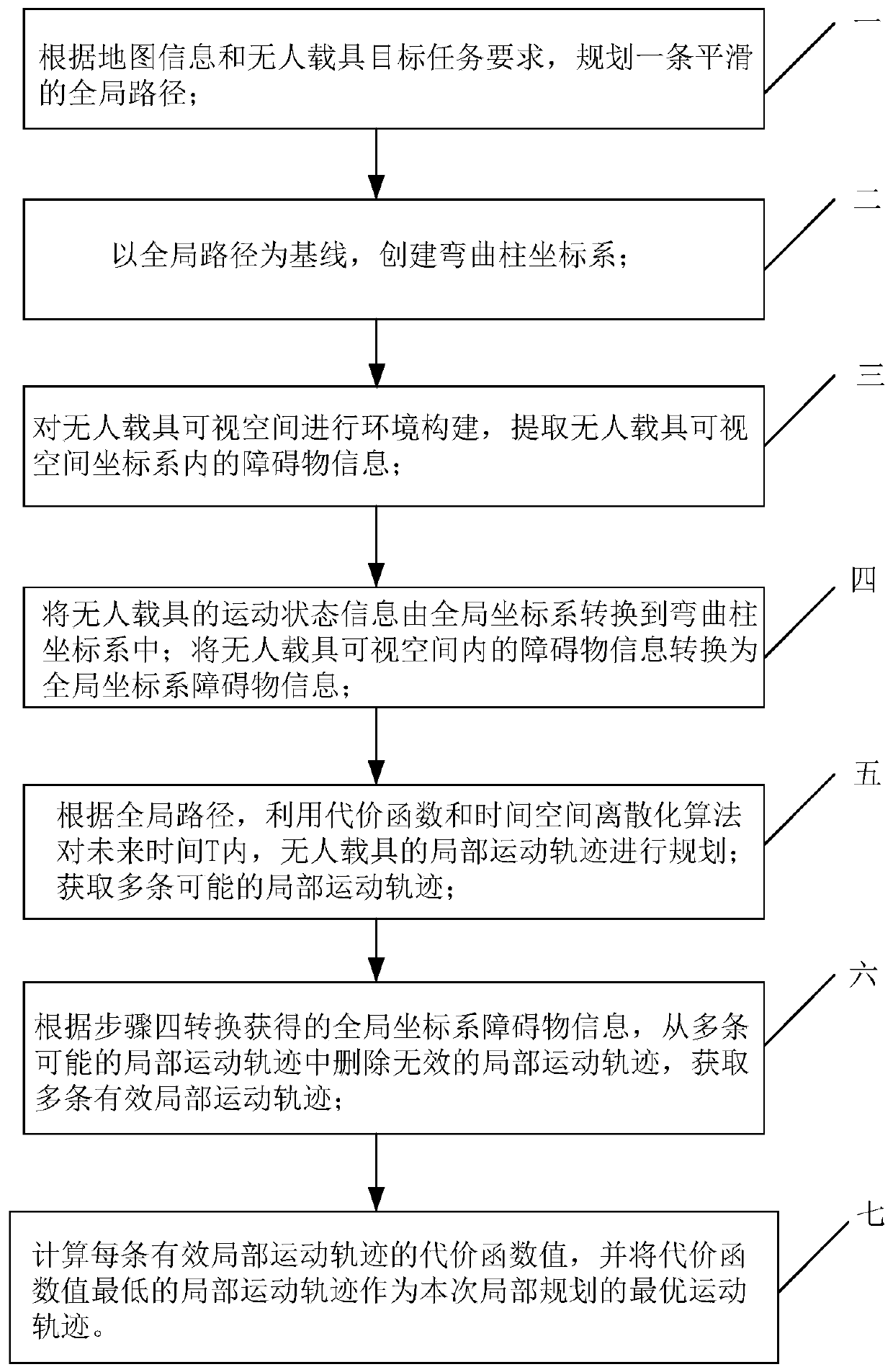
[0055] Specific implementation mode 1. Combination Figure 1 to Figure 3 Describe this embodiment, a local smooth trajectory planning method based on a curved cylindrical coordinate system described in this embodiment, the specific steps of the method are:
[0056] Step 1: Plan a smooth global path according to the map information and the target mission requirements of the unmanned vehicle;
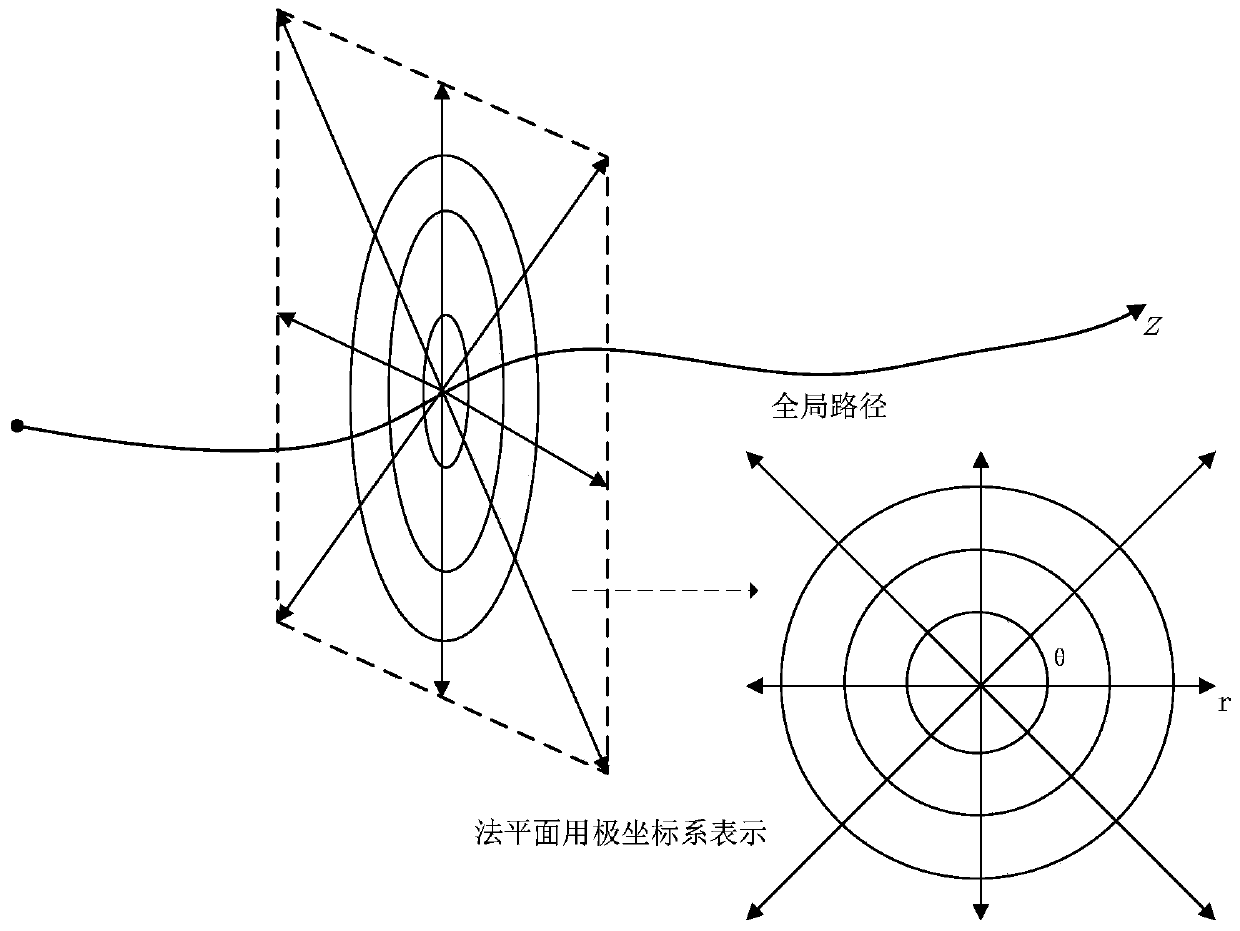
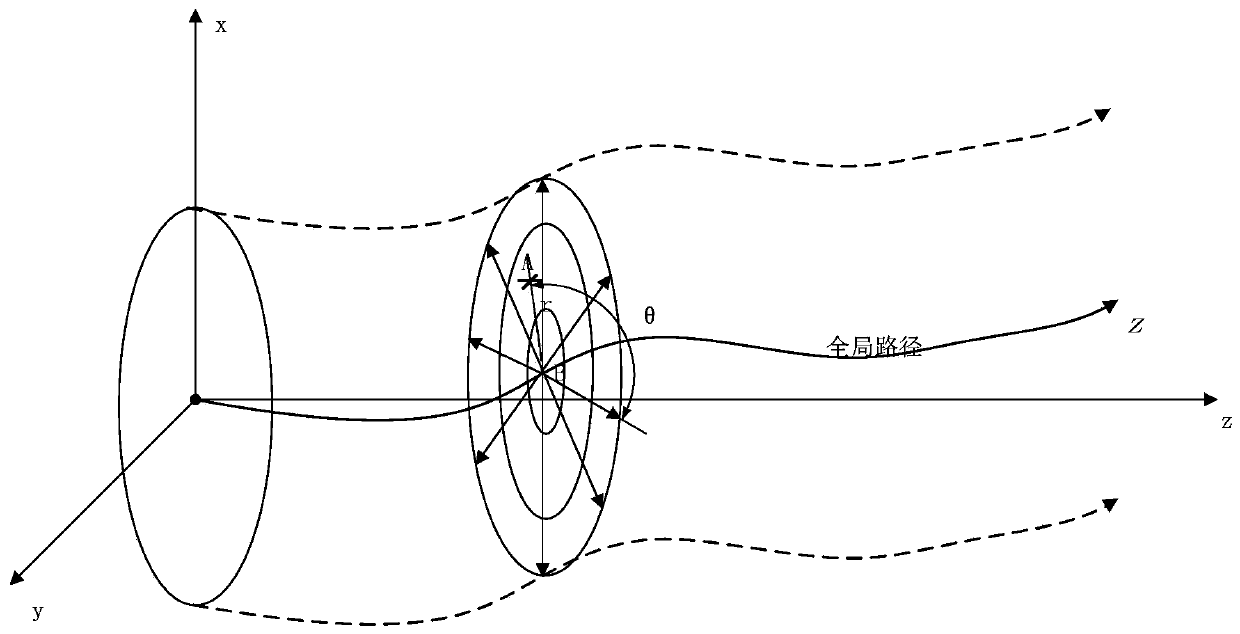
[0057] Step 2: Create a curved cylindrical coordinate system with the global path as the baseline;
[0058] Step 3: Construct the environment of the visible space of the unmanned vehicle, and extract the obstacle information in the coordinate system of the visible space of the unmanned vehicle;
[0059] Step 4: Convert the motion state information of the unmanned vehicle from the global coordinate system to the curved cylindrical coordinate system; convert the obstacle information in the visible space of the unmanned vehicle into the obstacle information of the global coordinate system; ...
specific Embodiment
[0109] combine Figure 4 to Figure 7 This embodiment is described, which describes a local trajectory planning method for an unmanned vehicle based on a curved cylindrical coordinate system.
[0110]Specifically: in a long corridor with an average width and height of 3m, let the drone fly at a constant speed of 5m / s. Occasionally, pedestrians will pass by in the corridor, and doors will open occasionally (various unmodeled obstacles). Suppose the unmanned vehicle is a quadrotor aircraft with a wheelbase of 200, the upper limit of speed is 10m / s, and the upper limit of acceleration is 5m / s 2 , the curvature is not constrained, and the positioning system relies on UWB positioning. Assume that the initial position of the quadrotor is at the global coordinate (1,0,0), and the initial velocity and initial acceleration are both 0.
[0111] Step 1: Plan a smooth global path according to the map information. In this example, it can be set as a global path along the centerline of the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More