Quick-to-replace minimally invasive robot end surgical instrument
A technology of surgical instruments and robots, applied in the medical field, can solve the problems of inconvenient installation, cost of major surgical instruments, time-consuming and labor-intensive, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
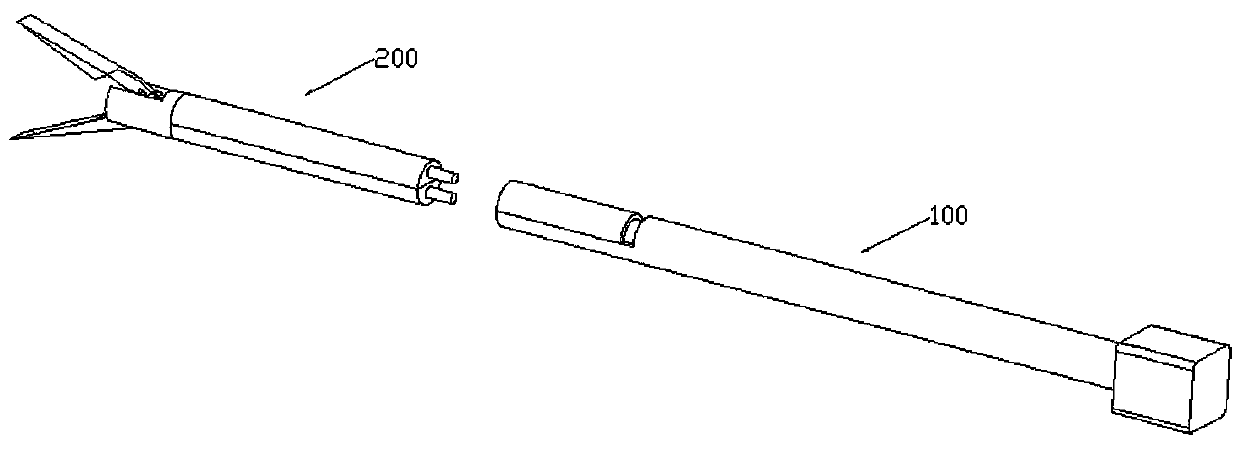
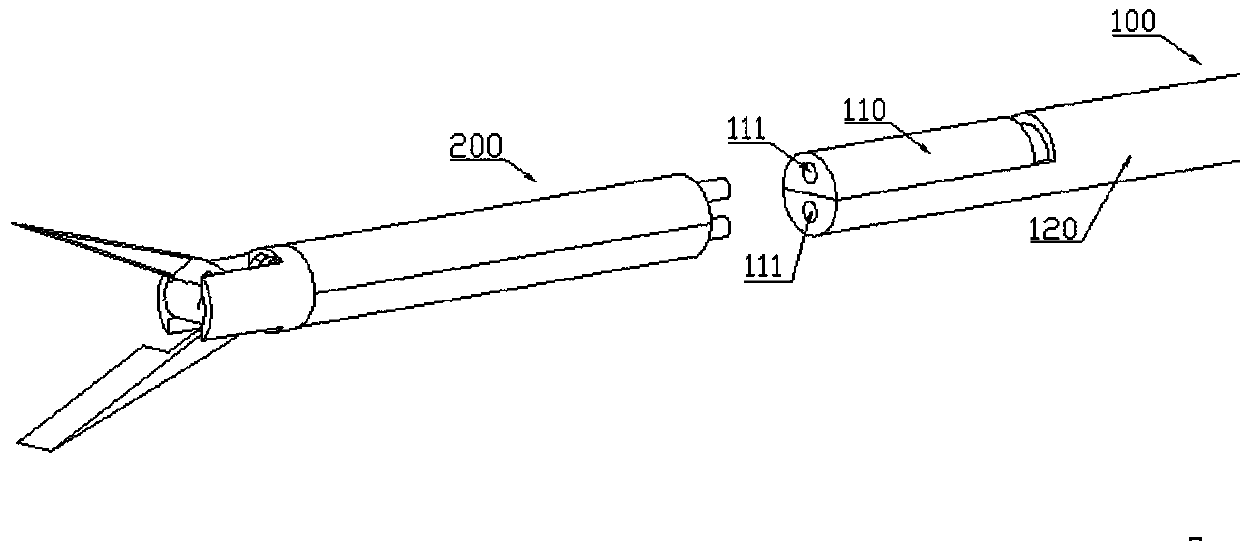
[0030] Embodiment 1: as figure 1 As shown, this embodiment discloses a quick-change minimally invasive robotic terminal surgical instrument, including a control part 100 and an operating part 200, the control part and the operating part are connected, the control part is installed on the robot, and the control part is provided with a driving part and A first long axis part, the operating part is used for surgical operation, the operating part is provided with a second long axis part and an operating end, the operating end completes the operation, and the operating end can be scissors, electric cutter, applying forceps, electrocoagulation forceps, Retractors, and various scalpels and scissors, etc., the first long axis part and the second long axis part are detachably connected so that the control part and the operating part are detachably connected, the driving part is installed on the robot, and the driving part passes through The first long-axis part and the second long-axis...
Embodiment 2
[0039] like Figure 16-18 As shown, a quick release tool for a surgical robot surgical instrument includes a chuck 300, a connecting portion 400 and an operating handle 500, the chuck and the operating handle are connected to the two ends of the connecting portion 400, and the chuck includes a first clamping rod 300a And the second clamping rod 300b, the first clamping rod and the second clamping rod are hinged on the connecting part, the connecting part includes a sleeve 410, the first piston 400 and the second piston 550 are arranged in the sleeve, the first piston is connected with the first A movable rod 430, the first movable rod is connected with the first clamp rod and the clamp rod, the second piston 550 is connected with the second movable rod 530, and the second movable rod can be driven by the operating handle so that the second piston moves along the operating handle. Move the handle end, the first clamping rod and the second clamping rod are provided with a first ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com