Master-slave cooperative positioning method for integrated navigation system of autonomous underwater vehicle
A technology of combined navigation system and underwater vehicle, applied in navigation, mapping and navigation, navigation calculation tools, etc., can solve the problem of inaccurate position and positioning, improve synchronization and stability, improve the unstable transmission of navigation information, The effect of increasing the convergence speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] In order to describe the technical solution disclosed in the present invention in detail, further elaboration will be made below in conjunction with the accompanying drawings and specific embodiments.
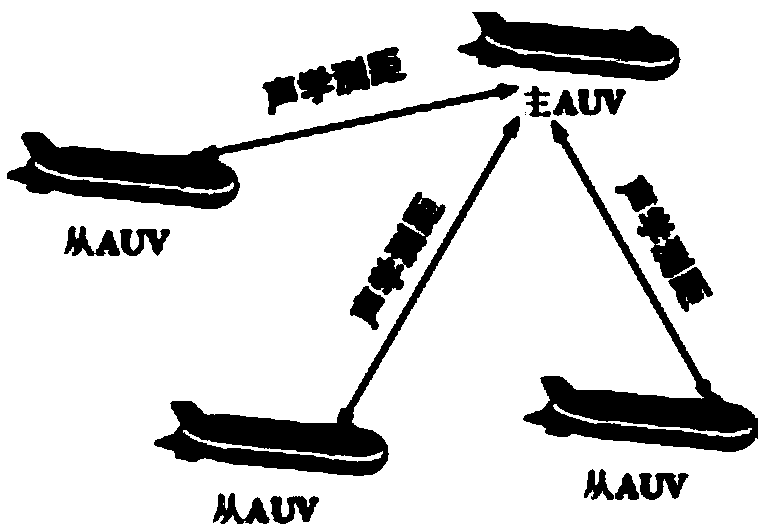
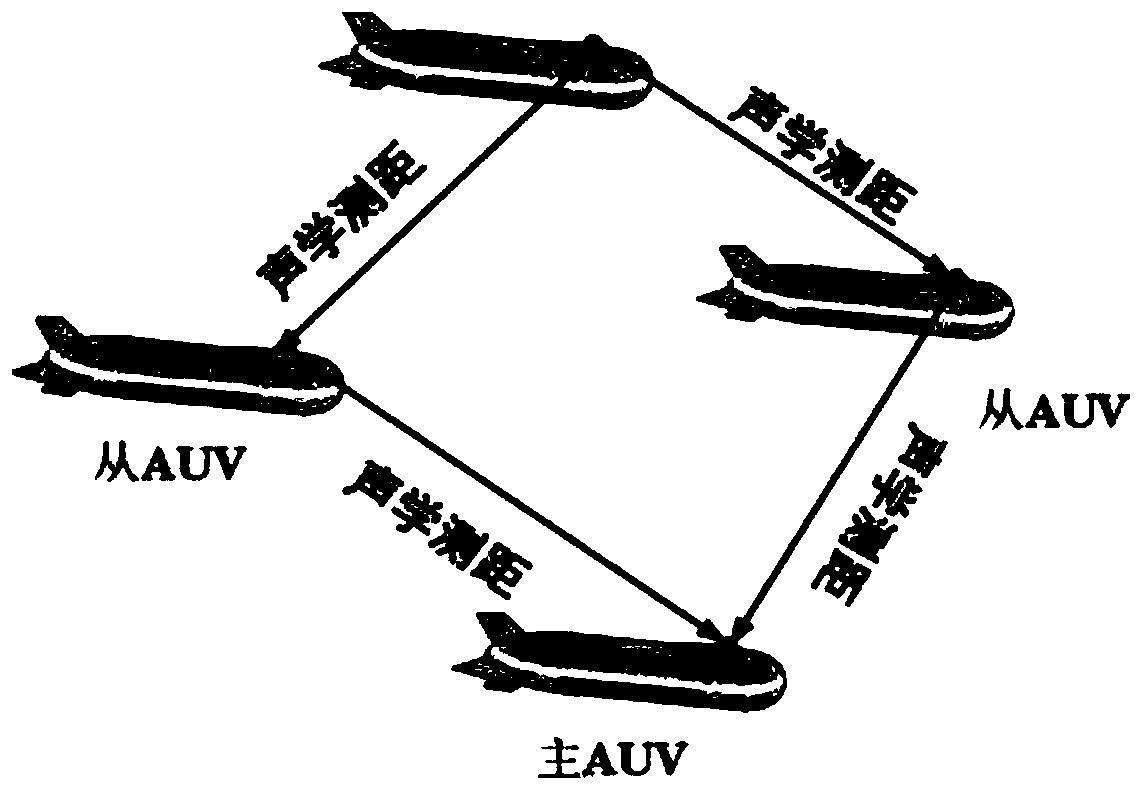
[0038] In the master-slave cooperative positioning system, the master AUV provides its own accurate position information and distance information to other slave AUVs, and at the same time, the slave AUV obtains speed information through its own low-precision and low-cost sensors to complete its own low-cost positioning system. Accurate dead reckoning, but due to the existence of cumulative sensor errors, long-term operation will cause positioning errors to increase or even diverge. In order to control the error, external absolute position information is needed as a reference to correct the positioning error of the slave AUV and realize the main Co-location of self-styled AUVs.
[0039] In the application of the method of the present invention, for the master-slave autono...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap