

Point cloud error calculation method
An error calculation and point cloud technology, applied in the field of three-dimensional measurement, can solve problems such as time-consuming, point cloud data errors, and low efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The technical solutions of the present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
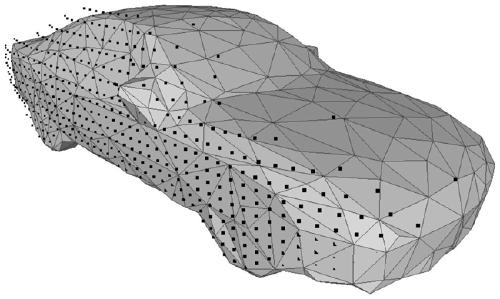
[0034] A point cloud error calculation method, the grid surface of the digital model of the object to be measured is recorded as the theoretical grid surface, the normal vector of any graphic surface in the theoretical grid surface is obtained, and the single vertex of any graphic surface is recorded as the vertex V;
[0035] The theoretical mesh surface is obtained by meshing the digital model of the object to be measured; the graphic surface is a triangular surface or a rectangular surface.
[0036] Such as figure 1 As shown, in this embodiment, taking the triangle facet as an example, the vertex V is the vertex of the triangle facet;
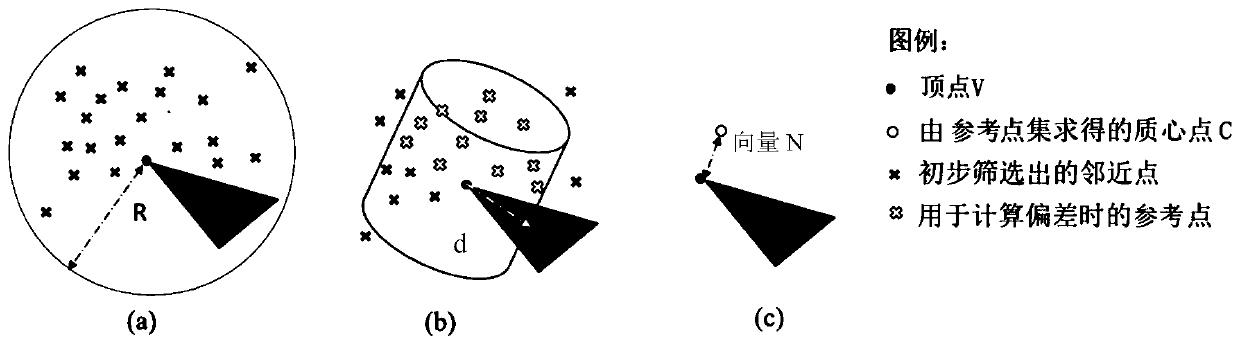
[0037] Use the 3D scanning device to obtain the 3D point cloud on the surface of the object to be measured, and record it as the measured point cloud; establish the topological r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More