

Loaded quadrotor unmanned aerial vehicle speed control method with completely unknown model parameters
A four-rotor drone, speed control technology, applied in the direction of electric speed/acceleration control, adaptive control, general control system, etc., can solve the problems affecting the stability of the quadrotor drone control system, drone control System performance degradation, performance degradation and other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0072] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
[0073] In this embodiment, the method for controlling the speed of a four-rotor UAV with loads whose model parameters are completely unknown includes the following steps:
[0074] 1) Establish a dynamic model of the quadrotor UAV with load, including:
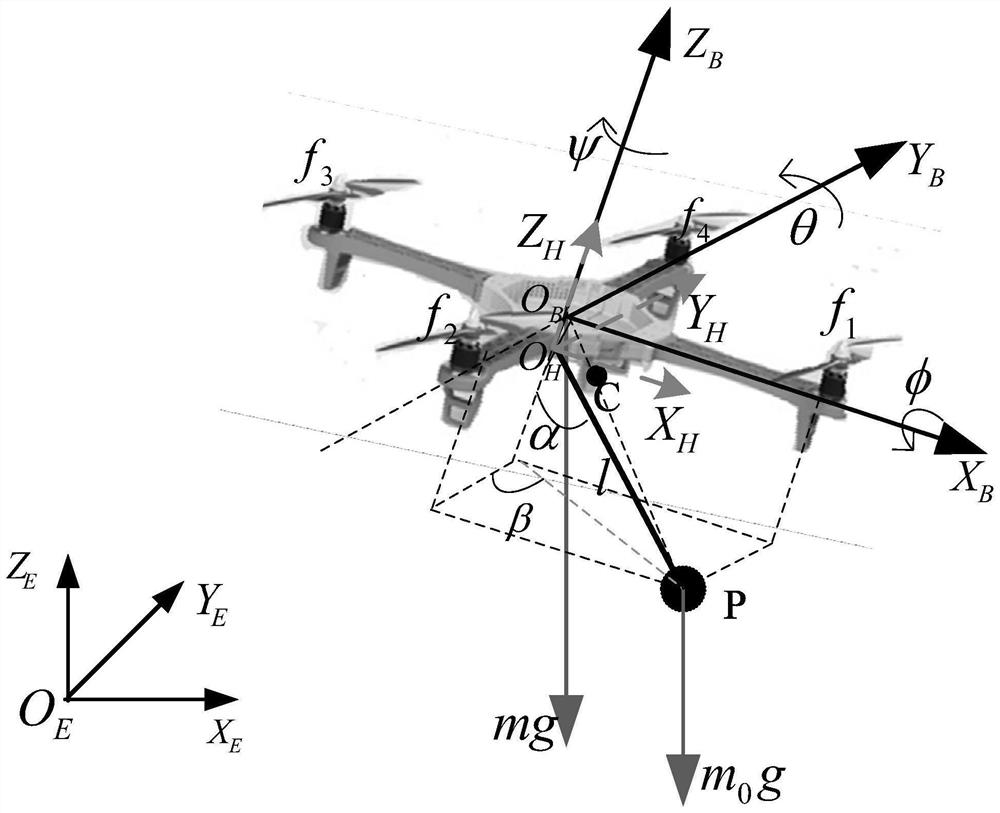
[0075] In order to accurately describe the attitude and position information of the quadrotor UAV with a suspended load, the following coordinate system is defined:
[0076] ①Earth fixed coordinate system (e system)
[0077] Also known as the ground coordinate system, expressed as O e =(X e ,Y e ,Z e ). Take the center of the earth as the origin of coordinates O e , X e The axis points in a certain direction in the horizontal plane, Z e The axis is perpendicular to the ground and upwards. Then, Y is determined by the right-hand rule e axis.
[0078] ②Body coordinate system (b system)
[0079...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More