

Task segmentation and cooperation method for security and protection robot
A task segmentation and robotics technology, applied in the field of robotics, can solve the problems of low robot robustness, system crash, and non-fault tolerance, and achieve the effect of robustness, robust software system, and not easy to crash
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
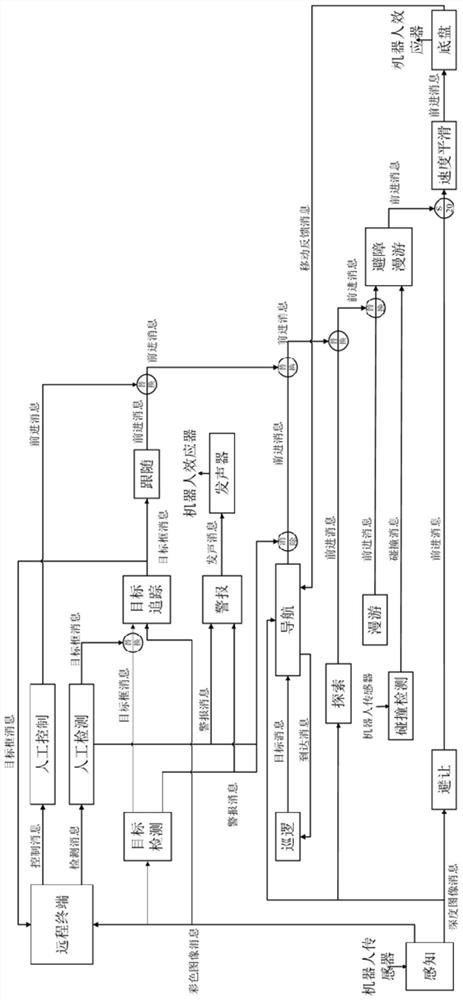
[0029] like figure 1 As shown, the task segmentation and coordination method of a security robot in the present invention firstly divides the tasks of the security robot, and establishes an inclusive task collaboration model according to the priority of each task. When a high-level task is triggered, it can automatically preempt Low-level tasks exercise control over the robot, and when high-level tasks are suspended or terminated, low-level tasks can be reactivated. In order to realize the coordination between tasks, the present invention designs an elimination module and a replacement module for coordinating the control output of high-level tasks and low-level tasks.
[0030] Specifically, the security robot task of the present invention is divided into the following five tasks, each task occupies one layer, and the priority of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More