

High-precision navigation and positioning method for mobile robot
A mobile robot, navigation and positioning technology, applied in vehicle position/route/altitude control, instruments, motor vehicles, etc., can solve problems such as high price, large cumulative error, damage, etc., achieve high continuous navigation and positioning accuracy, low cost, The effect of eliminating accumulated errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments, so that those skilled in the art can better understand the present invention and implement it, but the examples given are not intended to limit the present invention.
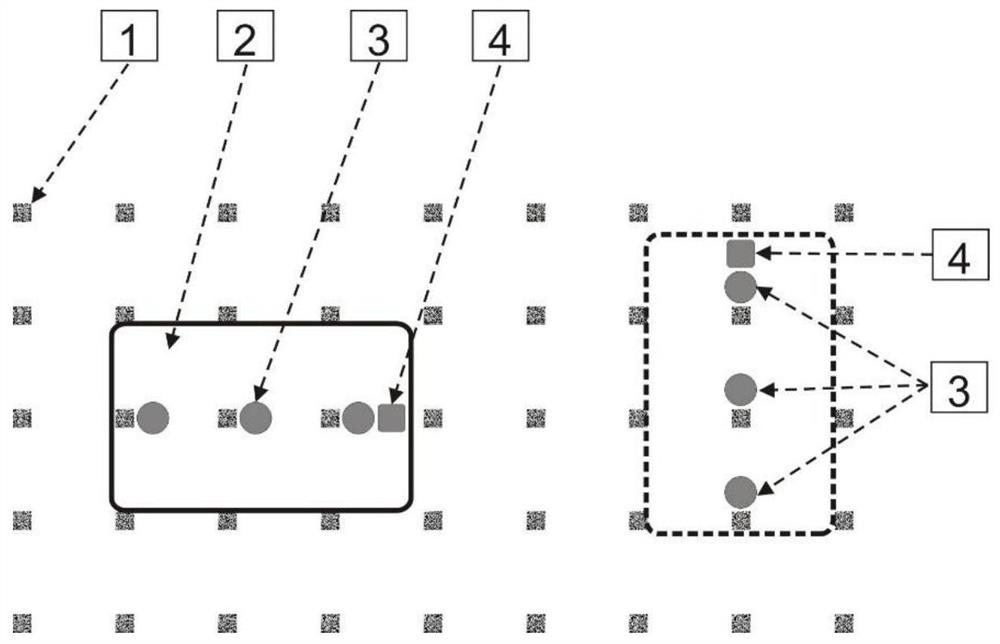
[0018] Such as figure 1 Shown: The AGV high-precision navigation system includes a visual camera system and an inertial navigation system (hereinafter referred to as the inertial navigation system) installed on the AGV, and a two-dimensional code array fixed on the surface of the site. The inertial navigation provides continuous navigation and positioning. The vision The camera system scans the two-dimensional code array fixed on the surface of the site to obtain accurate position and orientation information, and periodically calibrates the inertial navigation.
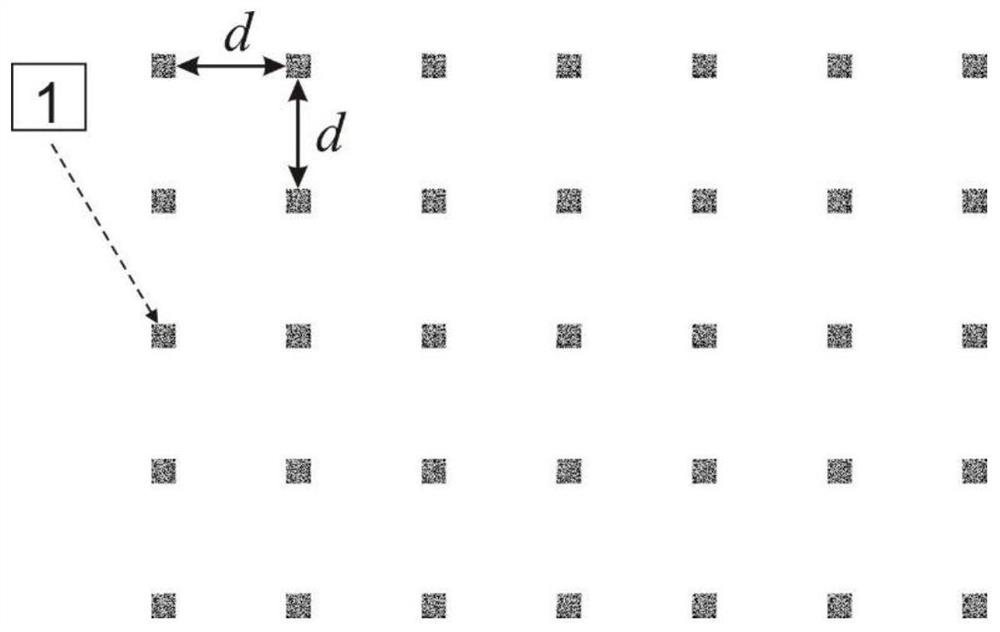
[0019] Such as figure 2 As shown, the two-dimensional code array fixed on the ground of the site, in the two-dimensio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More