

Variant six-rotor unmanned aerial vehicle with terrain self-adaptive take-off and landing and walking functions
A self-adaptive, six-rotor technology, applied in the direction of rotorcraft, fuselage, aircraft, etc., can solve the problems of weak ground self-adaptive ability, strong operator dependence, heavy structure weight, etc., to enhance terrain adaptability and improve endurance. Ability, the effect of increasing battery life
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] In order to enable those skilled in the art to better understand the technical solutions of the present invention, the present invention will be further described in detail below in conjunction with specific embodiments.
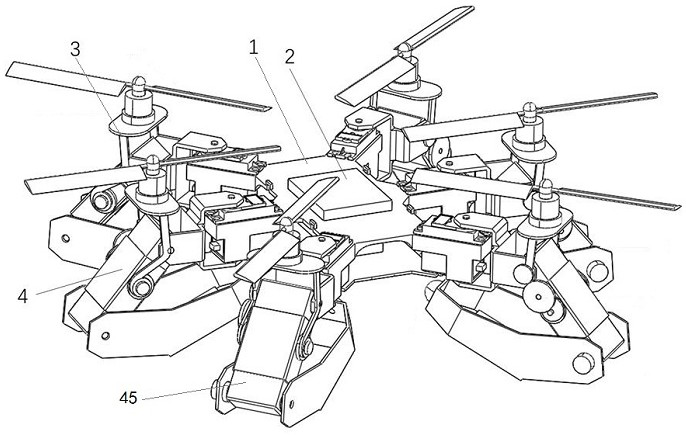
[0029] Embodiments of the present invention provide a variant six-rotor UAV with terrain adaptive takeoff and landing and walking functions, such as figure 1 As shown, it includes: installation platform 1, control box 2, rotor 3, support arm 4. The installation platform 1 is a cuboid, and six support arms 4 are symmetrically installed on the broadside of the installation platform 1, and the rotor 3 is installed on the support arms 4.
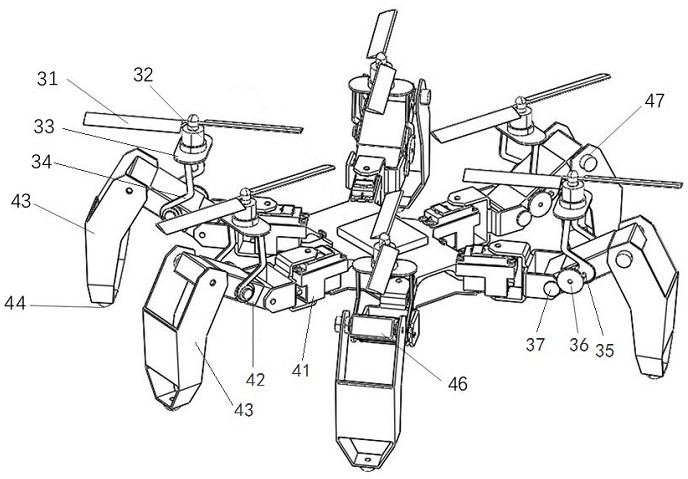
[0030] The support arm 4 includes a first joint 41 , a second joint 42 , a third joint 43 , a steering gear 45 , an angle sensor 46 and a distance sensor 47 .
[0031] The installation platform 1, the first condyle 41, the second condyle 42, and the third condyle 43 are movably connected in turn, and a steering gear 45...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More