

Autonomous navigation flight control system for deep space impact
A flight control system and autonomous navigation technology, applied in the field of deep space exploration, can solve the problems of low integration, poor autonomy of space exploration aircraft, large volume and weight, etc., to reduce volume and weight, improve system integration, and complete functions Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] Preferred embodiments of the present invention are described below with reference to the accompanying drawings. Those skilled in the art should understand that these embodiments are only used to explain the technical principle of the present invention, and are not intended to limit the protection scope of the present invention.
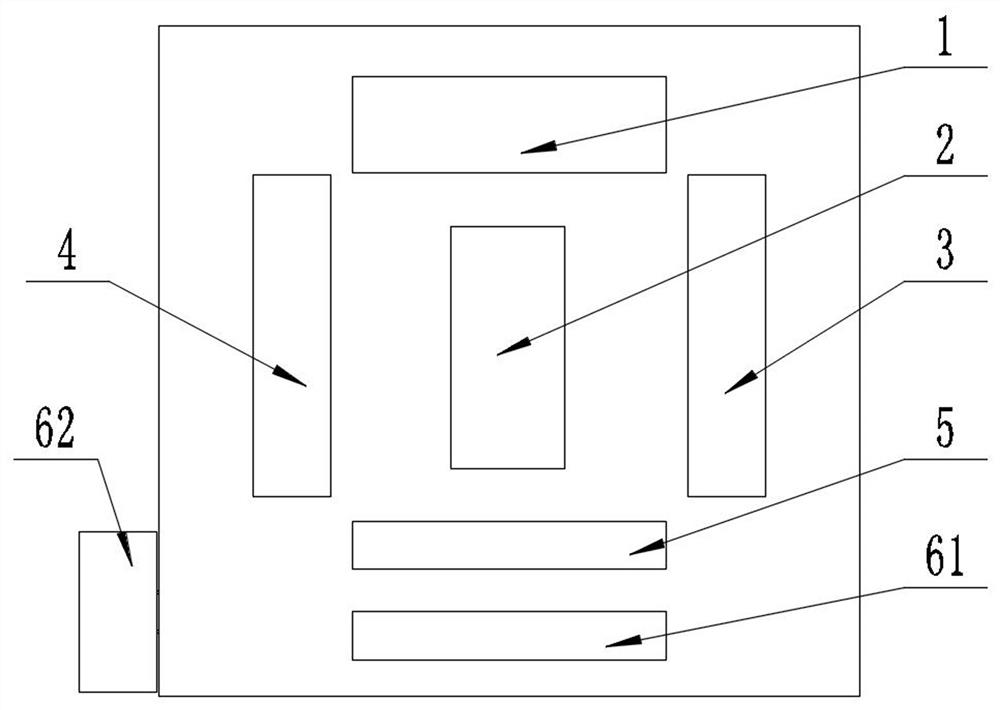
[0038] The present invention provides an autonomous navigation flight control system for deep space impact, comprising a first carrying device and a second carrying device, the first carrying device is arranged outside the second carrying device and is separated from the second carrying device by a first The device is connected, wherein the first bearing device is an elliptical structure, the second bearing device is a bullet-shaped structure, and the second bearing device and one or more first bearing devices form a conical structure as a whole to reduce the resistance during the system's descent; the second A carrier device is equipped with a ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More