

A distributed high real-time control system and method for a quadruped robot
A quadruped robot and control system technology, applied in the field of quadruped robot distributed high real-time control system, can solve problems such as inability to provide sufficient safety guarantee, inability to achieve real-time performance, error frames, etc., to shorten the control cycle frequency, Easy to implement, high real-time effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
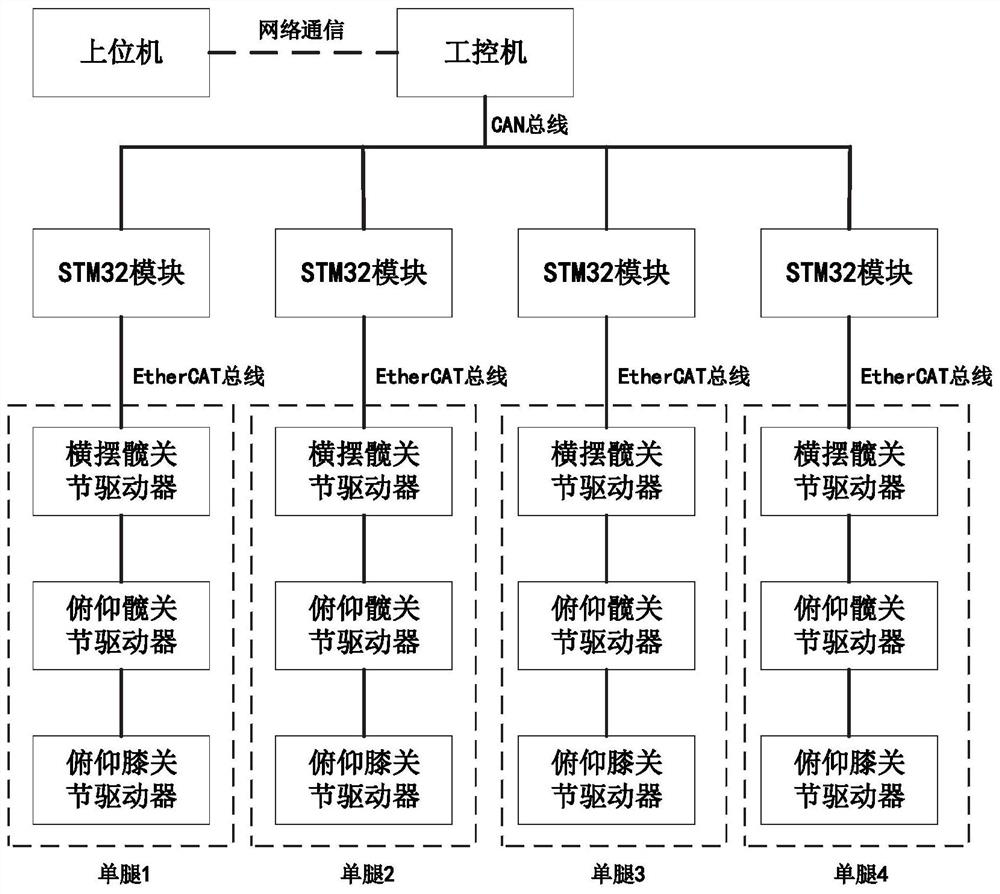
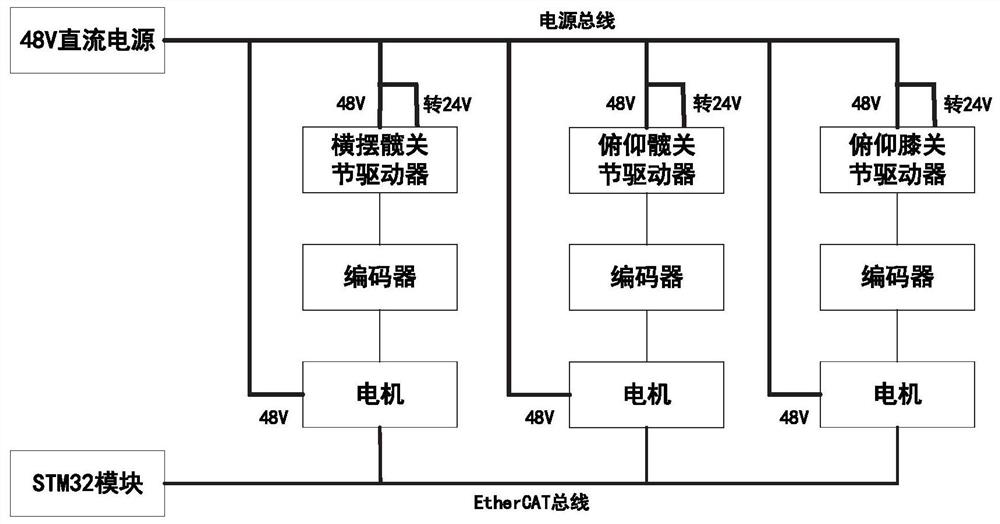
[0040] The present disclosure Example 1 provides a four-legged robot distributed high-real-time control system, such as figure 1 The show, including 1 computer (control terminal), 4 STM32 module master (control master), 12 driver slaves (control slave), three slaves corresponding to each primary station Topological connection, control system block diagram of each single leg figure 2 Indicated.
[0041] The four-foot robot distributed high-real-time control system of the present embodiment employs the EtherCAT protocol, the industrial computer runs the four-control algorithm and passes the information to the STM32 module main station through the CAN bus.
[0042] 4 STM32 modules run the single leg control algorithm as the EtherCAT master and pass the information to the drive slave, 12 drives as the EtherCAT slave receives the corresponding control instruction from the master station from the master, and the motor according to the main station control command Motion control, and the...
Embodiment 2
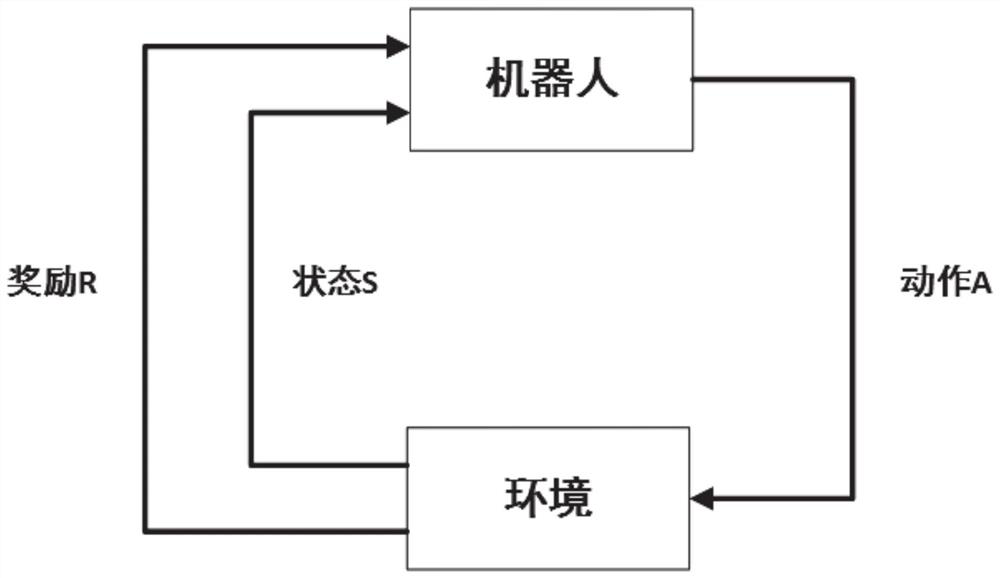
[0072] In Example 2 of the present disclosure provides a four-legged robot distributed high real time control method, the control flow chart is Figure 4 As shown, including the following steps:
[0073] The upper computer transmits instructions to the industrial computer, and the policy π in the industrial computer is based on the current state. i And award value R i Take action a i ;
[0074] Among them, the host machine passes the wireless network of the router, according to the TCP / IP protocol, data transmission according to the TCP / IP protocol, the host computer can transmit the corresponding instructions according to the different exercise gait of the quadruple robot, control the robot to step, diagonally Trojan, sprouting, etc.
[0075] After a positive motion, the indenter trajectory plan is planned, and the industrial computer calculates the foot-term desired position P. d , Foot-end current position P i With the foot end speed V and send it to the STM32 module;
[007...
Embodiment 3
[0080] The present disclosure Example 3 provides a four-legged robot, including the four-legged robotic distributed high-real-time control system according to Embodiment 1 of the present disclosure.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More