

Joint axis angle adjustable type multi-axis ankle joint prosthesis
A joint axis and adjustable technology, which is applied in the field of bionic human prosthetics, can solve the problems of low adaptability, low degree of personalized fit, and poor coordination between the wearer's limbs on the affected side and the normal side, etc., and achieves a simple adjustment process and improved with moderately low effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
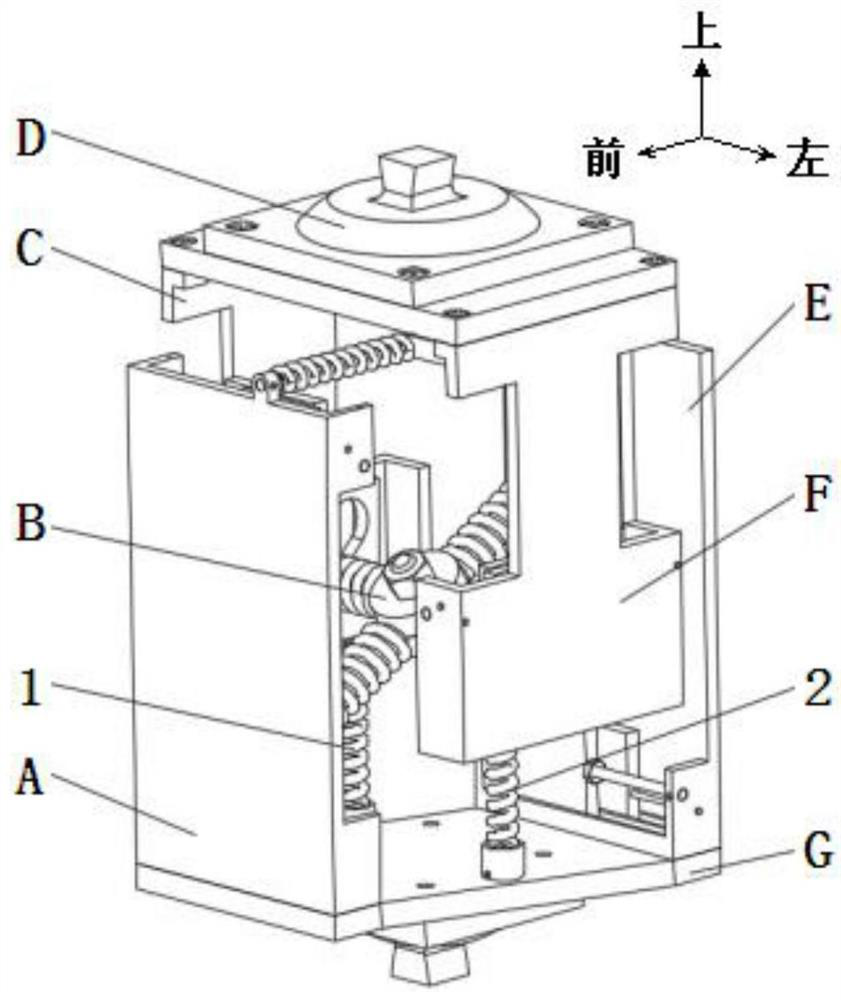
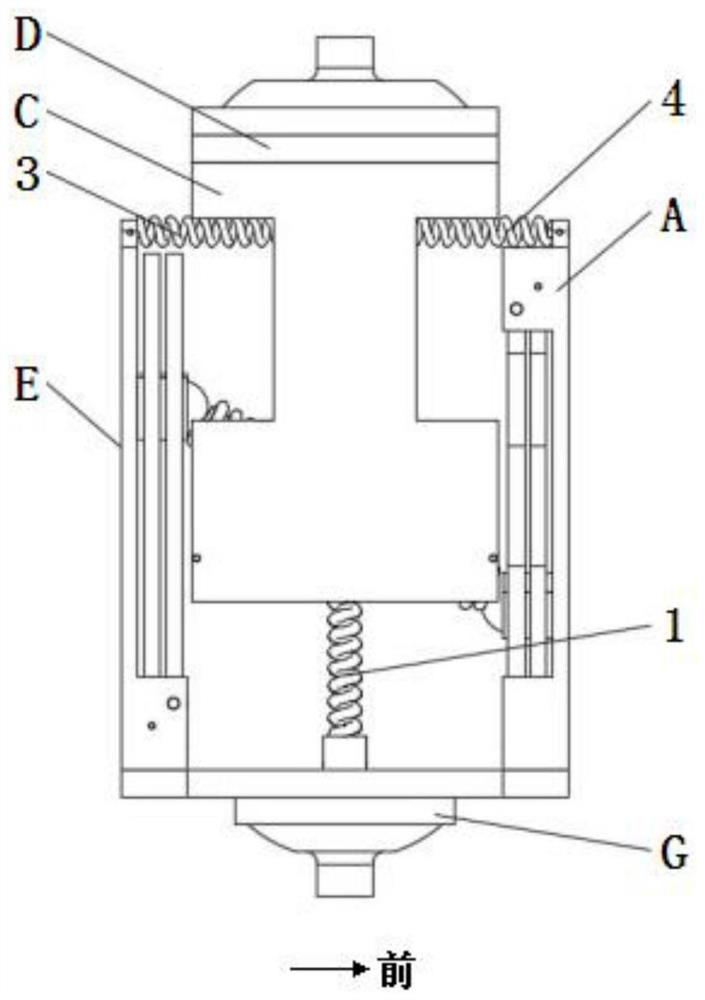
[0052] Such as figure 1 and figure 2 As shown, the present invention is composed of front part A, joint shaft part B, right part C, upper cover D, rear part E, left part F, bottom cover G, spring I1, spring II2, spring III3, and spring IV4. The lower end of the front connecting plate 5 of part A is fixed on the front end of the bottom cover G; the lower end of the rear connecting plate 12 of the rear part E is fixed on the rear end of the bottom cover G; the upper end of the right connecting plate 22 of the right part C is fixed on Below the right end of the upper cover D; the upper end of the left connecting plate 17 of the left part F is fixedly connected under the left end of the upper cover D; the joint shaft part B is located at the front part A, the right part C, the upper cover D, the rear part E, and the left part F , and the space enclosed by the bottom cover G, and the joint shaft part B is in a cross state with the rear high and the front low; Slot sliding connec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More