

Automatic lane changing collision avoidance control method and device, vehicle and storage medium
A control method and vehicle technology, applied in the direction of control devices, vehicle components, transportation and packaging, etc., can solve problems such as danger and vehicle collision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
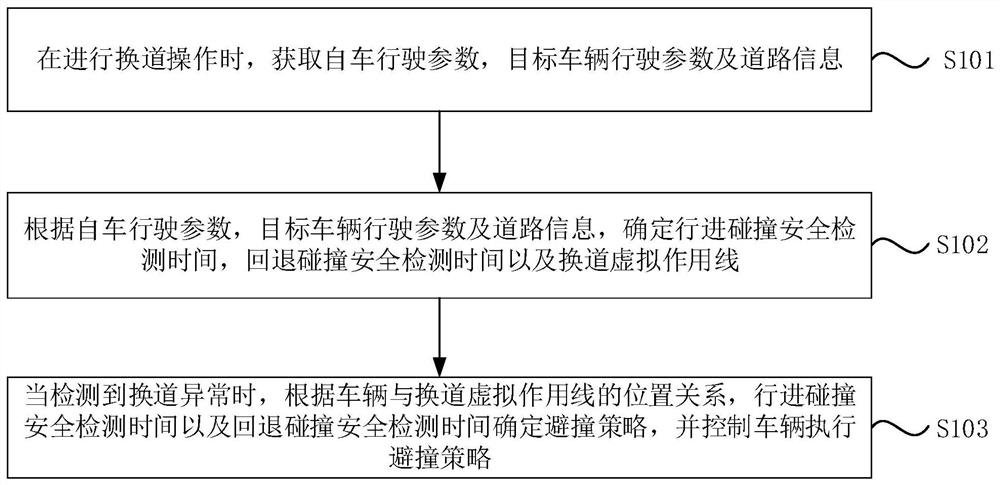
[0030] figure 1 It is a flow chart of an automatic lane change and collision avoidance control method provided by Embodiment 1 of the present invention. This embodiment is applicable to the situation where a vehicle encounters an abnormal lane change during automatic lane change and determines a collision avoidance strategy. The method It can be executed by an automatic lane change and collision avoidance control device. The automatic lane change and collision avoidance control device can be implemented by software and / or hardware. The automatic lane change and collision avoidance control device can be configured on a computing device, specifically including the following steps:
[0031] S101. Acquiring the driving parameters of the own vehicle, the driving parameters of the target vehicle and road information during the lane changing operation.
[0032] Among them, the driving parameters of the own vehicle can be understood as characteristic values used to represent the dri...
Embodiment 2
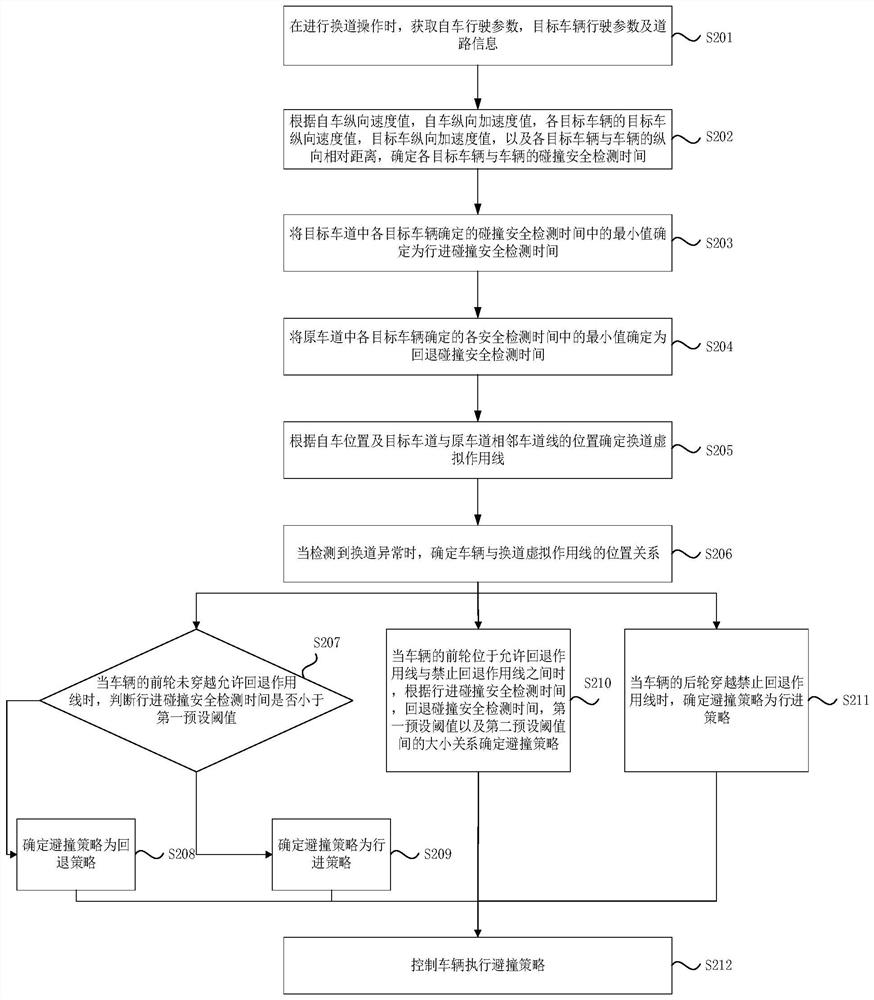
[0045] figure 2 It is a flow chart of an automatic lane change control method provided by Embodiment 2 of the present invention. The technical solution of this embodiment is further refined on the basis of the above-mentioned technical solution, specifically including the following steps:
[0046] S201. Obtain the driving parameters of the own vehicle, the driving parameters of the target vehicle and road information during the lane changing operation.
[0047] S202. According to the longitudinal velocity value of the own vehicle, the longitudinal acceleration value of the own vehicle, the longitudinal velocity value of the target vehicle of each target vehicle, the longitudinal acceleration value of the target vehicle, and the longitudinal relative distance between each target vehicle and the vehicle, determine the collision between each target vehicle and the vehicle Security check time.
[0048] Specifically, the longitudinal velocity of the ego vehicle is denoted as V ...
Embodiment 3
[0092] Figure 4 It is a flow chart of a lane-changing collision avoidance control method provided by Embodiment 3 of the present invention. The technical solution of this embodiment is further refined on the basis of the above-mentioned technical solutions. In this embodiment, the details are specifically carried out before the vehicle enters the automatic lane change, which specifically includes the following steps:
[0093] S301. Determine whether the vehicle satisfies the automatic lane changing condition.
[0094] Wherein, the automatic lane changing condition includes that the lateral movement risk collision time is greater than the third preset threshold, and the vehicle's traveling collision safety detection time is greater than the first preset threshold.
[0095] Specifically, when it is determined that the vehicle needs to change lanes automatically, the radar installed on the vehicle body is used to determine whether there is a vehicle with a lateral overlap with ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More