

Telescopic parking robot and control method thereof
A robot and telescopic technology, applied in the field of car parking, can solve the problems of complex structure of parking robots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
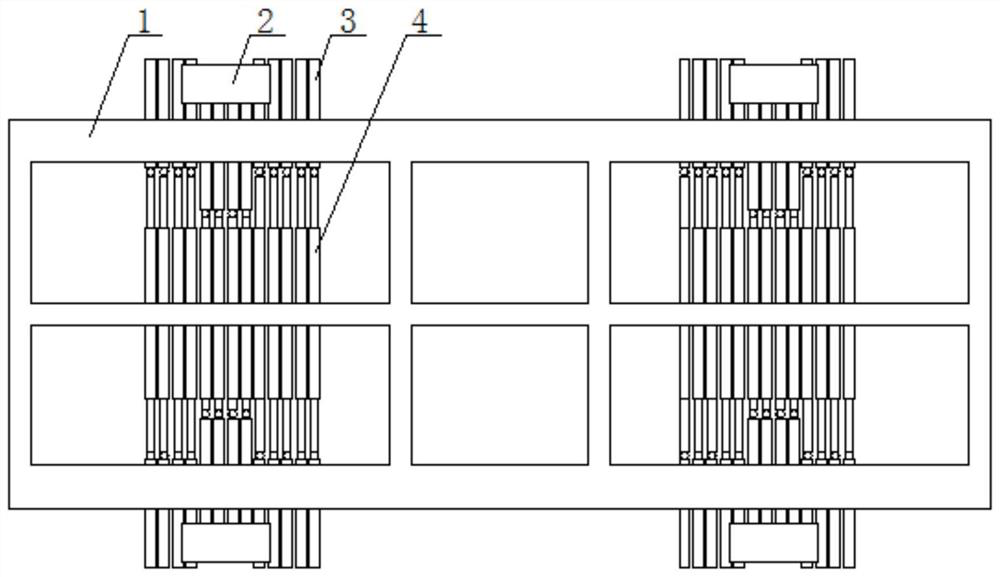
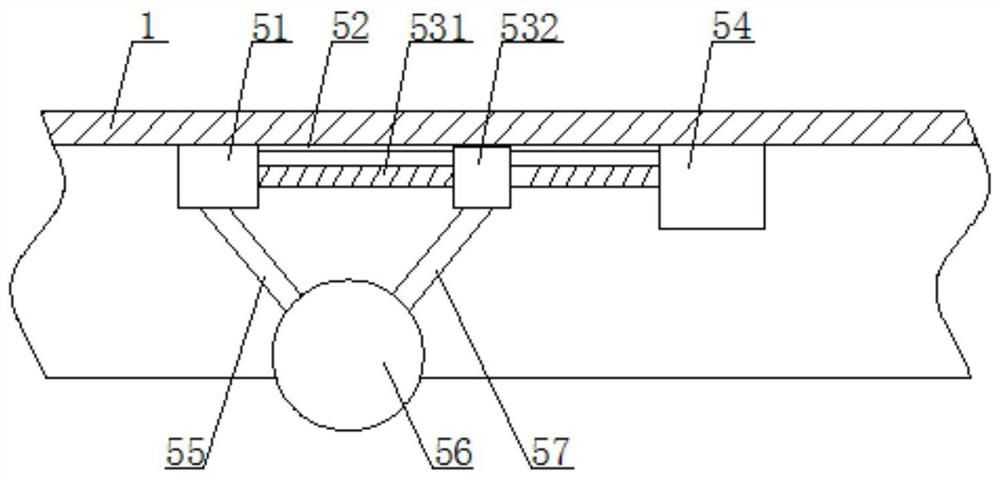
[0034] Embodiment 1: a kind of retractable parking robot, such as figure 1 and figure 2As shown, it includes a frame type body 1 and a plurality of telescopic mechanisms installed on the body 1, a plurality of elevating mechanisms, a plurality of wheels 56 and a control system, and the length of the body 1 is greater than the maximum length of a car (not shown) to be parked. Length, the width of the body 1 is less than the minimum width of the car to be parked, the output end of each telescopic mechanism is connected with a telescopic rod 3, each telescopic rod 3 is arranged along the width direction of the body 1, a plurality of wheels 56 and a plurality of lifting mechanisms Installed on the bottom of the body 1, multiple lifting mechanisms are used to lift the body 1, and each wheel 56 is driven by a hub motor. In this embodiment, the outer edge of each wheel 56 adopts a Mecanum wheel structure, and each hub motor Installed on the inner edge of the wheel 56, the control s...
Embodiment 2
[0038] Embodiment 2: a control method of the telescopic parking robot of embodiment 1, comprising the following steps:
[0039] Step S1, after the communication module B receives the parking instruction sent by the external cloud controller, the location of the car to be parked and the license plate number information, it transmits the information to the information processing module A, and the information processing module A receives the information and executes the steering drive Module E sends instructions, and the steering drive execution module E controls the rotation of each wheel hub motor, so that the parking robot can drive to the right under the car to be parked without a load. Among them, during the no-load driving process of the parking robot, the environment perception module C detects the parking robot in real time The location information, the control system controls multiple hub motors to adjust the driving trajectory of the parking robot in real time;
[0040]...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More