

Relay charging path planning method and system for small unmanned aerial vehicle
A small unmanned aerial vehicle, charging path technology, applied in control/regulation systems, mechanical equipment, electric vehicles, etc., can solve problems such as difficulty in completing reconnaissance tasks, limited serviceable range radius, and short cruising range of small unmanned aerial vehicles
Active Publication Date: 2020-10-09
NAT UNIV OF DEFENSE TECH
View PDF6 Cites 5 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
However, the cruising range of small UAVs is short, and the radius of its service range is limited accordingly after starting from the base, which greatly reduces the efficiency of
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
 Login to View More
Login to View More PUM
 Login to View More
Login to View More Abstract
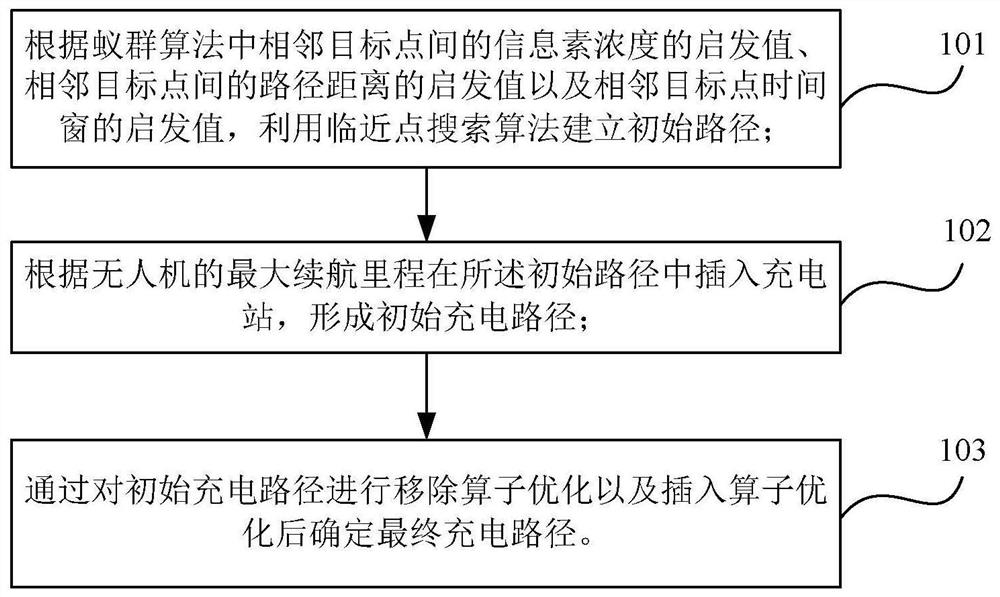
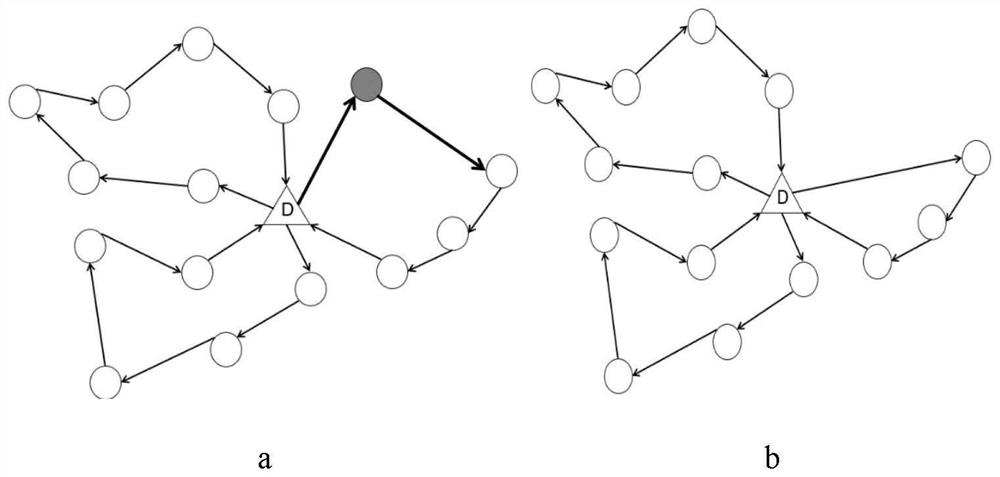
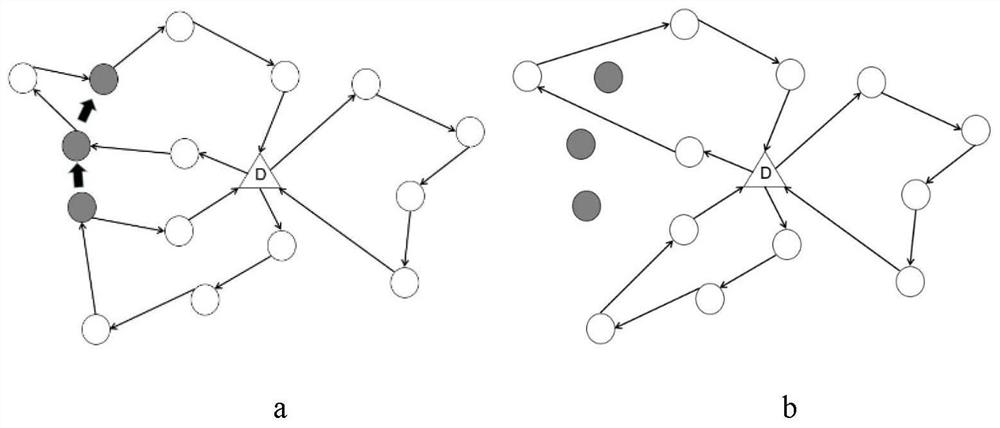
The embodiment of the invention provides a relay charging path planning method and system for a small unmanned aerial vehicle. The method comprises the following steps: according to a heuristic valueof pheromone concentration between adjacent target points, a heuristic value of a path distance between the adjacent target points and a heuristic value of a time window of the adjacent target pointsin an ant colony algorithm, establishing an initial path by utilizing an adjacent point search algorithm; inserting a charging station into the initial path according to the maximum endurance mileageof an unmanned aerial vehicle to form an initial charging path; and determining a final charging path by performing removal operator optimization and insertion operator optimization on the initial charging path. According to the technical scheme, an optimal charging station insertion heuristic algorithm is designed in consideration of selection of the charging station and determination of the charging level; and in view of the complexity of the problem, a local search algorithm is introduced, the search space in the ant colony algorithm iteration process is expanded, and the search probabilityof the optimal solution is increased.
Description
technical field [0001] The invention relates to a method and system for planning a relay charging path of a small unmanned aerial vehicle. Background technique [0002] With the improvement of the high-tech combat system, the timely acquisition of battlefield information and the increasingly fierce competition for space in modern warfare have put forward higher requirements for the acquisition of combat object position information and target reconnaissance. The current military reconnaissance methods mainly include satellite remote sensing reconnaissance, manned aircraft reconnaissance and unmanned aerial vehicle reconnaissance. Among them, unmanned aerial vehicle reconnaissance has gradually been widely used because of its characteristics of no risk of casualties, flexible deployment, and timely response. At the same time, the rapid development of sensor technology, information transmission network and aircraft platform provides strong technical support for UAV reconnaissan...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More IPC IPC(8): G05D1/10
CPCG05D1/101Y02T10/7072
Inventor 石建迈毛慧婷陈超黄魁华周玉珍
Owner NAT UNIV OF DEFENSE TECH