

Three-dimensional attitude estimation method in disordered grabbing based on SHOT and ICP algorithms
An attitude estimation, three-dimensional attitude technology, applied in computing, image data processing, instruments, etc., to achieve the effect of rotation invariance, improved accuracy, and high robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The technical solutions in the present invention will be clearly and completely described below in conjunction with the embodiments. Apparently, the described embodiments are only some of the embodiments of the present invention, not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
[0039] The present invention is based on the three-dimensional posture estimation method in the disorderly grasping of SHOT and ICP algorithm, and this method is used for solving the object pose estimation problem in disorderly grasping process, comprises the following steps:
[0040] The first step, point cloud preprocessing:
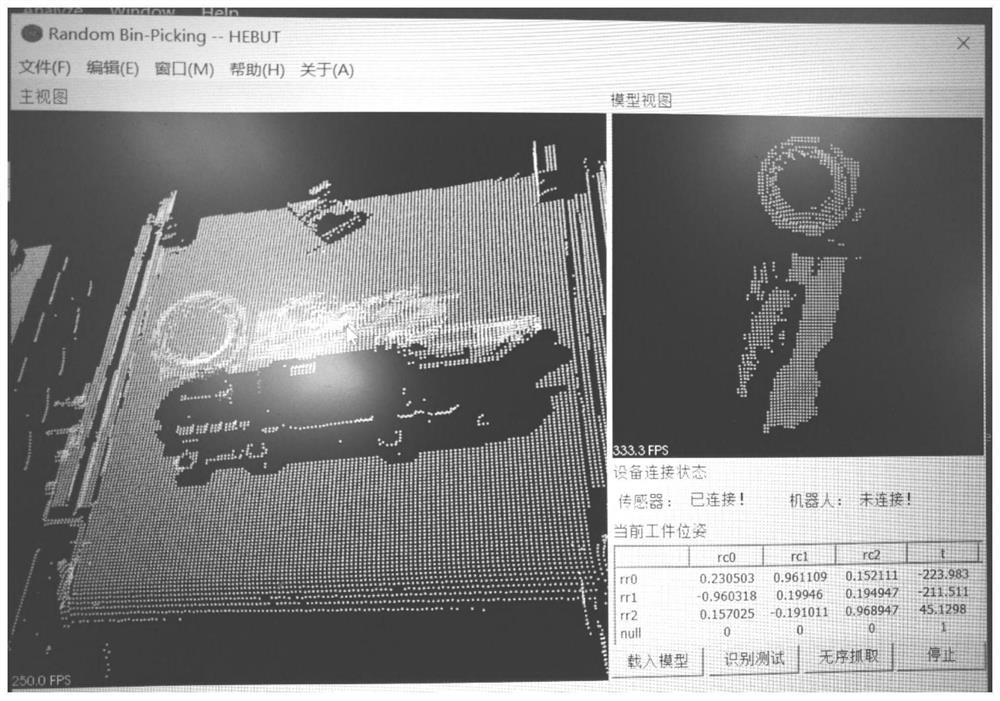
[0041] 1-1 Point cloud acquisition: Use the Photoneo surface structured light 3D camera to obtain the point cloud data of the workpiece surface (and obtain the corresponding 2D image at the sam...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More