

Strong maneuvering target tracking method based on multiple variable structure models
A mobile target tracking and multi-model technology, applied in the field of target tracking, can solve the problem of low target tracking accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
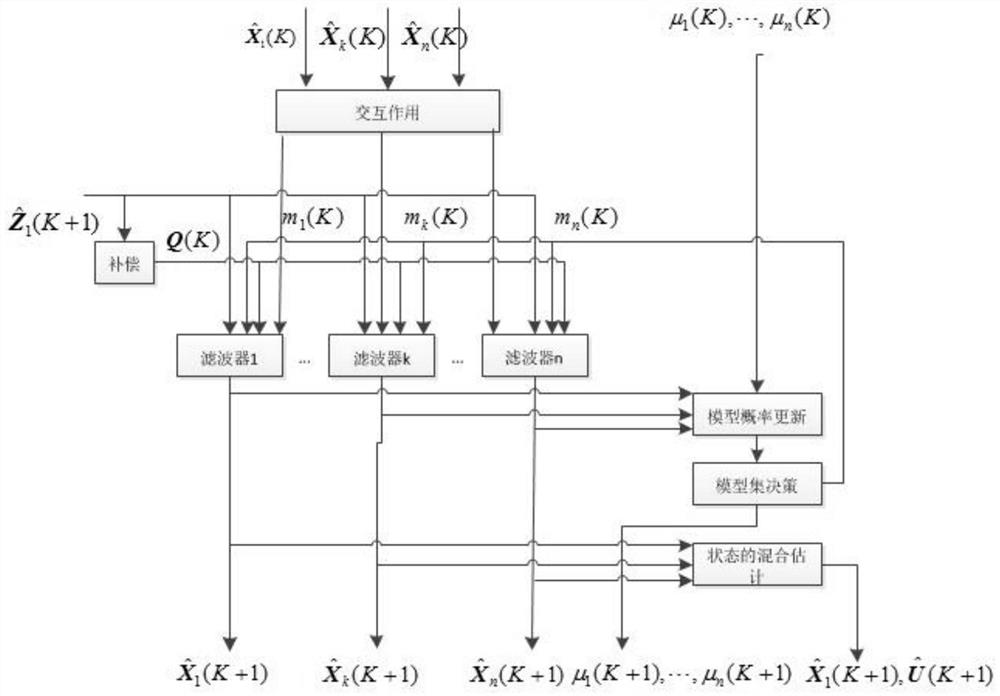
[0110] refer to figure 1 Specifically explaining this embodiment, the object of the present invention is to improve the tracking and positioning accuracy of a high-speed and strong maneuvering target in the adjacent space, and to predict the aerodynamic characteristic parameters of the target and detect the target's maneuvering in combination with the tracking principle. By establishing the dynamic model of the aircraft, the aerodynamic characteristic parameters of the target are expanded into the target tracking state quantity, and the filter tracking is carried out; at the same time, the tracking data of the target is obtained by combining the variable structure multi-model algorithm based on maneuver detection. Above-mentioned invention purpose is realized by following technical scheme:
[0111] In step 1 of the present invention, a dynamic tracking model set is constructed according to the dynamic characteristics of the target aircraft, and a state equation set of the mane...
Embodiment
[0239] The configuration of the computer used in the simulation of the embodiment of the present invention is: the CPU is i7-8550U, the main frequency is 1.80GHz, and the memory is 8GB.
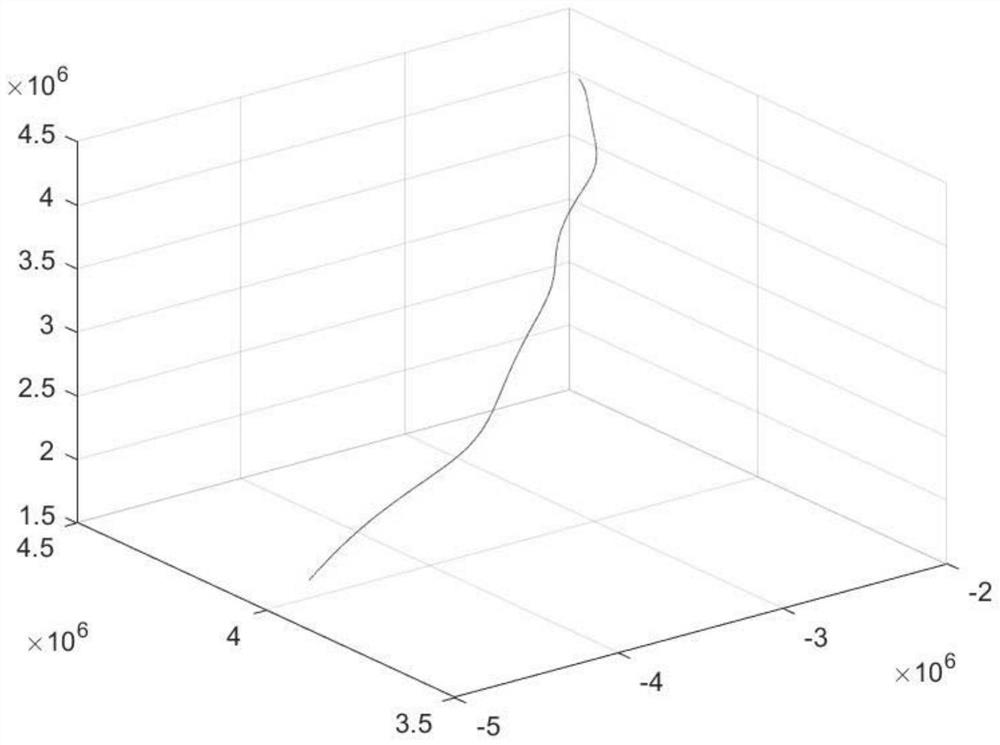
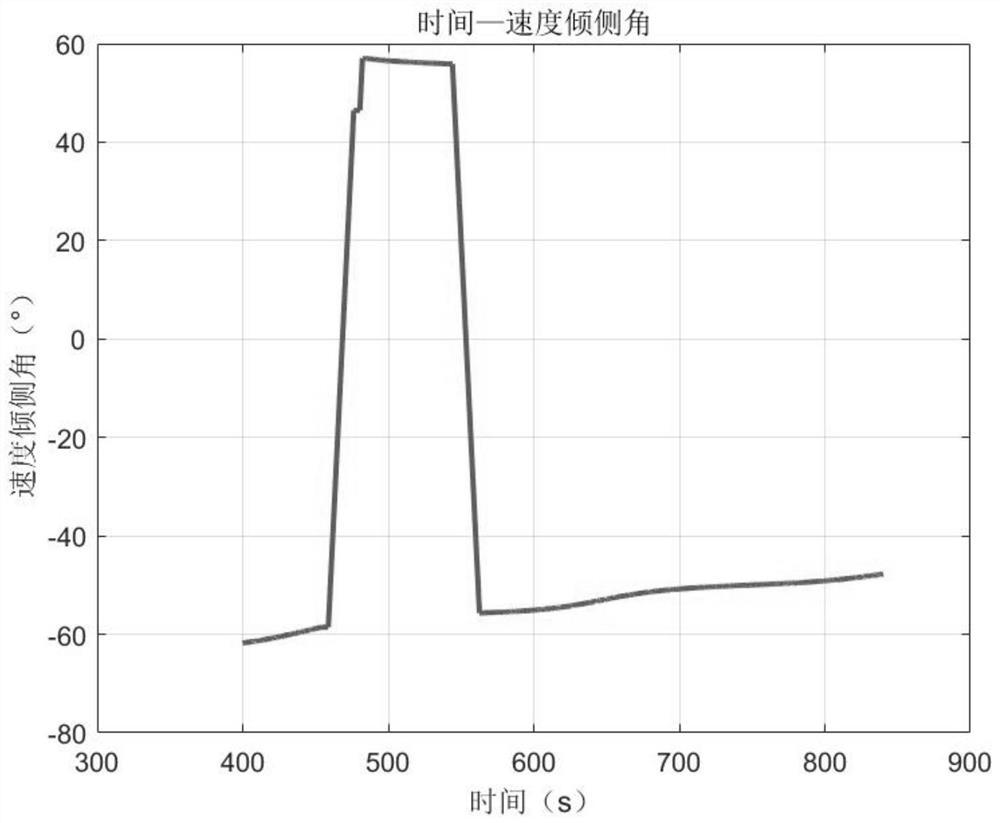
[0240] Simulation scene: the target is maneuvering in the adjacent space, and the trajectory is as follows figure 2 As shown, the attack angle of the target changes slowly during this process, and the maneuvering of the target is mainly based on the change of the roll angle of the target's movement speed. The change of the roll angle is as follows: image 3 shown.
[0241] A variety of multi-model algorithms combined with the target tracking dynamics model realizes the tracking of strong maneuvering targets in the adjacent space, and performs multiple Monte Carlo simulations. The following mainly analyzes and compares the accuracy, convergence speed and stability of each algorithm.
[0242] The target tracking state quantity is X=[x y z v x v y v z alpha D alpha L ] T , the roll a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More