

Visual SLAM method based on optical flow and semantic segmentation
A semantic segmentation and vision technology, applied in character and pattern recognition, instruments, biological neural network models, etc., can solve problems such as poor tracking and positioning effects of SLAM
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
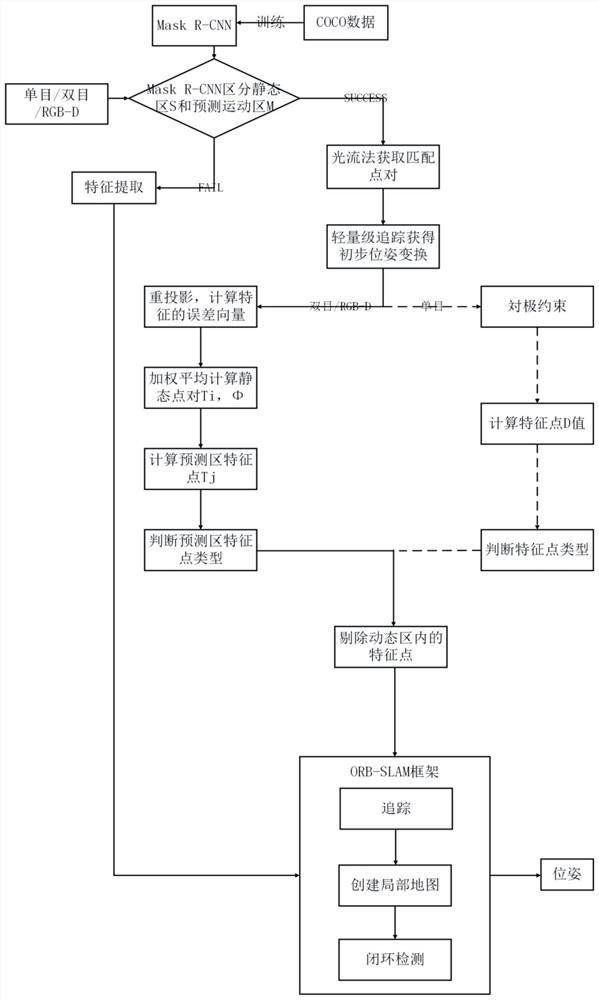
[0064] This embodiment provides a visual SLAM method based on optical flow and semantic segmentation, which mainly includes the following steps:
[0065] Step 1. Use the semantic segmentation network to segment the input image information to obtain static regions and predict dynamic regions.
[0066] Step 2. Perform feature tracking on the static region and the predicted dynamic region by using the sparse optical flow method.
[0067] Step 3. Determine the type of the feature points in the input image information, and remove the dynamic feature points.
[0068] Step 4. The set of removed motion feature points is used as tracking data, input into ORB-SLAM for processing, and the pose result is output.
[0069] In order to better understand the above-mentioned technical solution, the above-mentioned technical solution will be described in detail below in conjunction with the accompanying drawings and specific implementation methods.
[0070] This embodiment provides a visual S...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More