

Method and system for calculating point-to-point shortest path in plane in building
A technology for computing planes and shortest paths, applied in computing, special data processing applications, data processing applications, etc., can solve problems that cannot be calculated, technology cannot be supplemented and corrected, and the starting point/target point cannot be considered
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
example
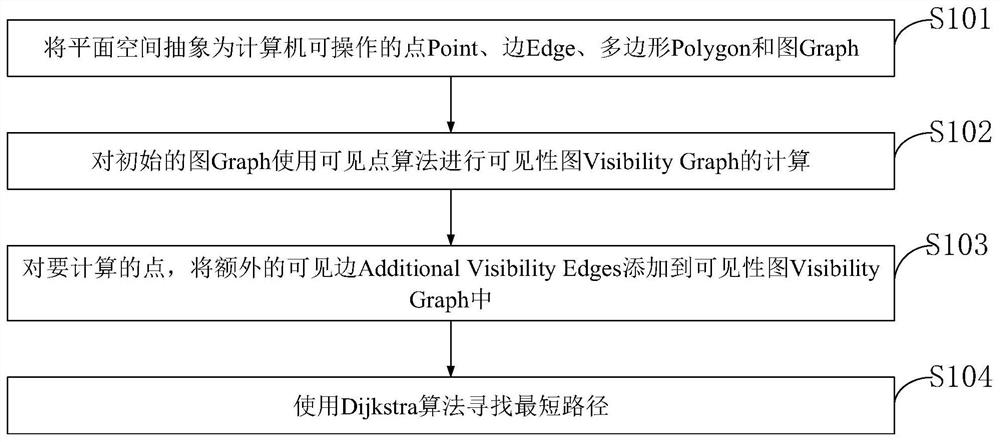
[0141] For each polygon:
[0142] M = number of points in the polygon
[0143] For i=0, i
[0144] Let the i-th point be P1, and the (i+1)%M point be P2, generate Edge (P1, P2) and add this Edge to Graph.
[0145] 2.3 Calculate the visibility graph (Visibility Graph):
[0146] Based on the existing graph, an initialized visibility graph is established. Specifically, by using the visible point algorithm (described in detail later), find out other points that each point in the graph can see, and add the edge formed by each point and its corresponding visible point to the visibility diagram, thus completing the basic visibility diagram.
[0147] Specifically include:
[0148] Input: Graph
[0149] Output: Visibility Graph
[0150] Create a copy based on the current graph (Graph), that is, the initialized visibility graph (Visibility Graph)
[0151] For each point Point in Graph:
[0152] Calculate all the visible points of the point in the graph, using the Visibl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More