Non-contact robot gripper
A robotic gripper, non-contact technology, applied to conveyor objects, furnaces, lighting and heating equipment, etc., can solve problems such as pollution, scratches, damage and deformation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] In order to make it easy to understand the technical means, creative features, goals and effects achieved by the present invention, the following examples are combined with the appended figure 1 to attach Figure 8 The technical solutions provided by the present invention are described in detail, but the following content is not intended as a limitation of the present invention.
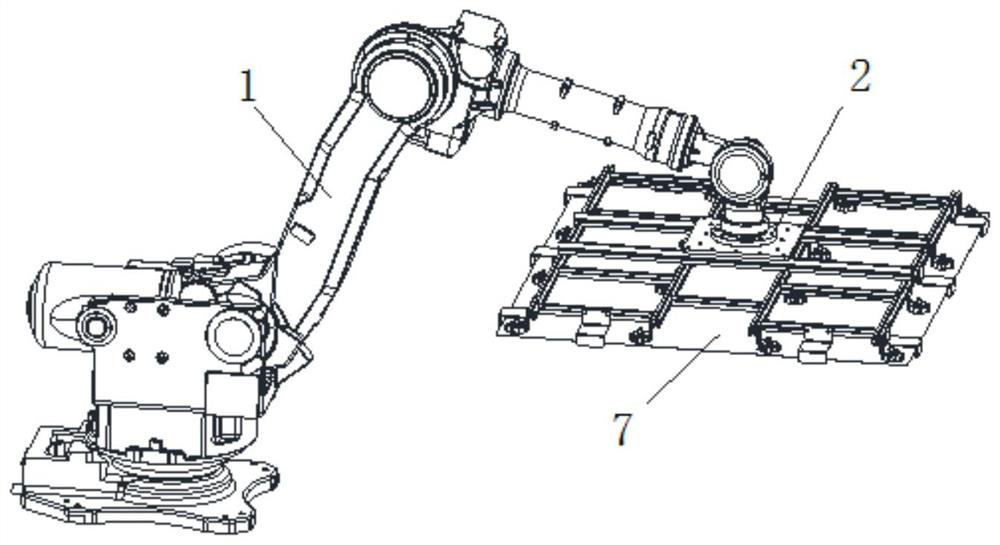
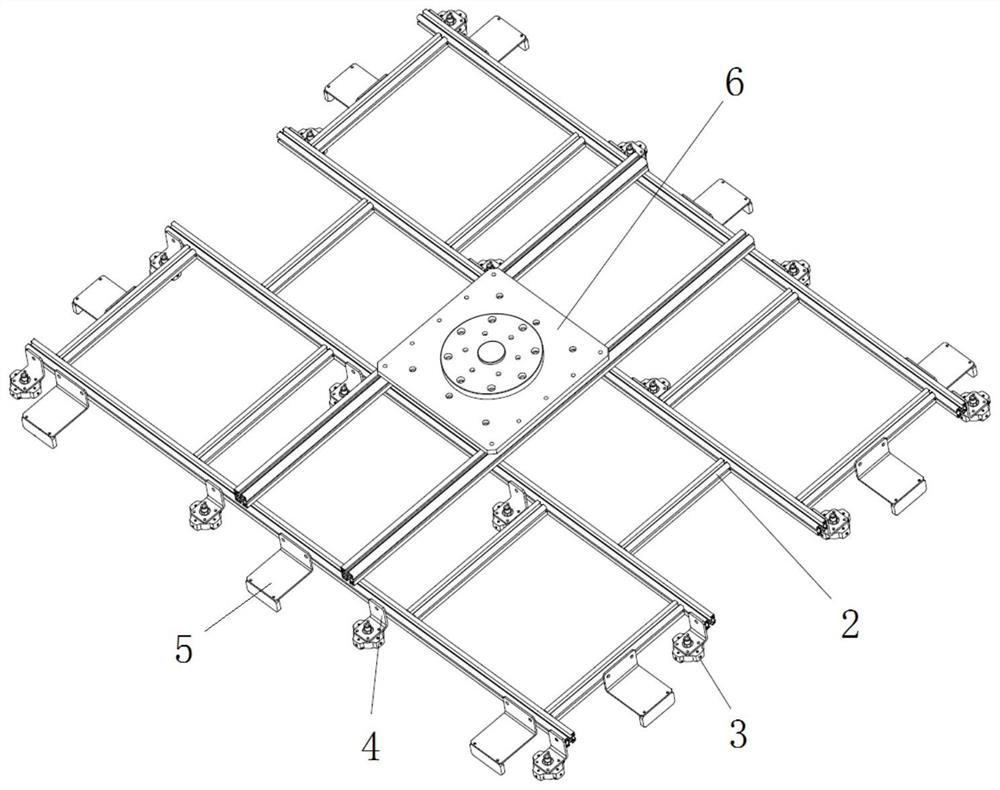
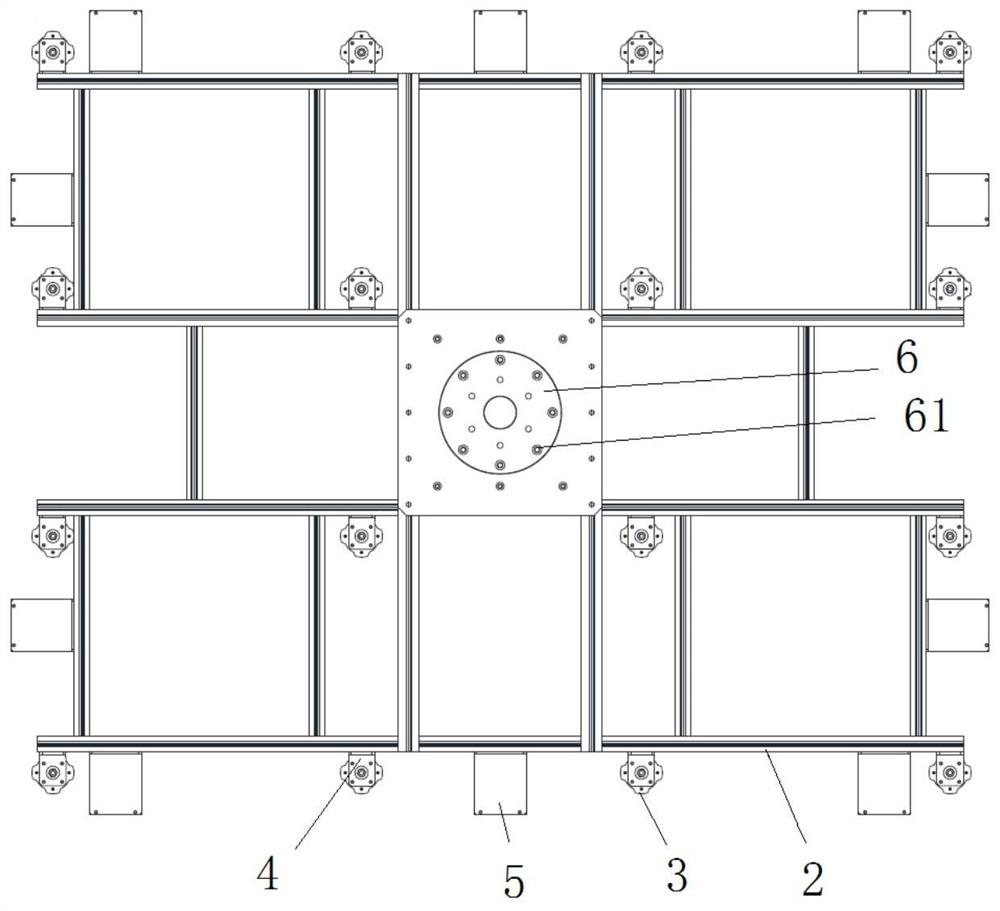
[0032] figure 1 It is a structural diagram of an embodiment of a non-contact robot gripper of the present invention. Such as figure 1 As shown, the non-contact robot gripper provided in this embodiment includes: a robot 1, a frame 2 and several non-contact suction cups 3, the middle part of the frame 2 is connected to the arm of the robot 1, and several non-contact suction cups 3 are arranged on the frame 2, the robot 1 can move the position of the non-contact suction cup 3 through the frame 2, so as to realize the basic grasping and transfer of the glass sucked by the non-contact suction c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com