Base station position coordinate determination method and device, equipment and storage medium
A technology for location coordinates and determination methods, which is applied to services, electrical components, and wireless communications based on location information.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
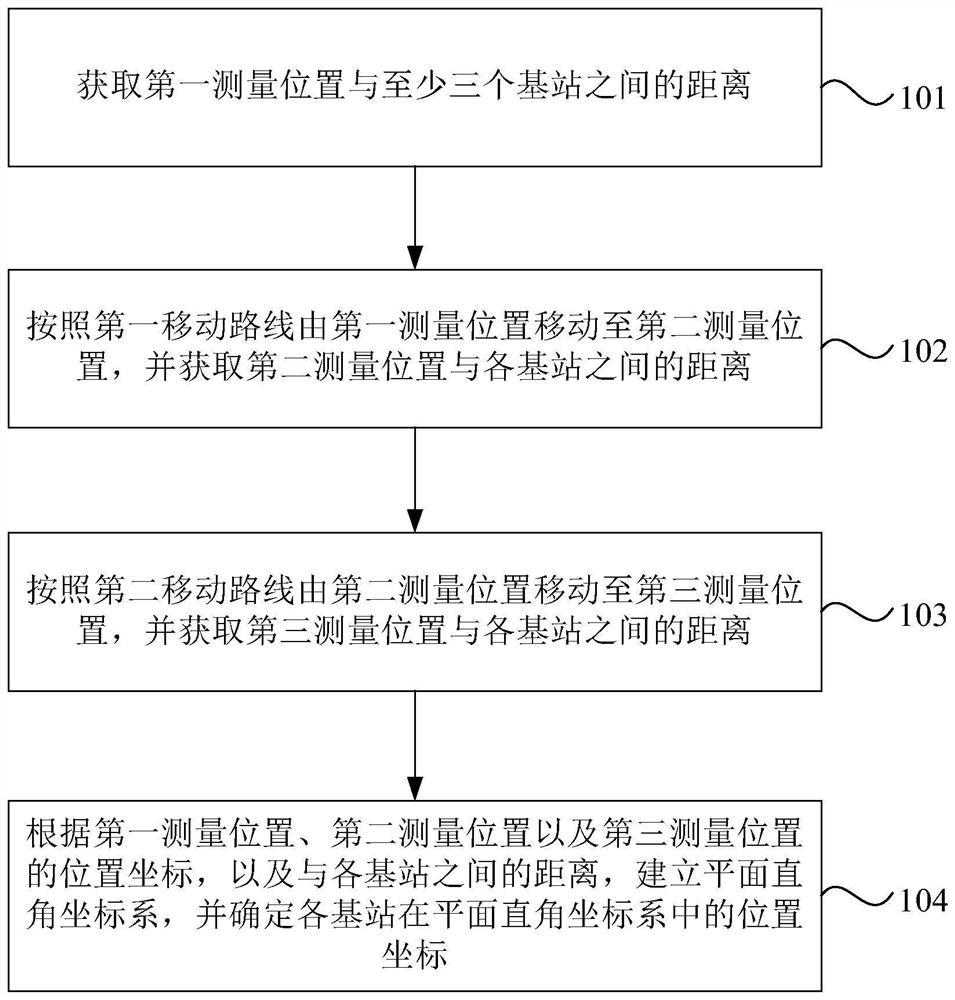
[0031] Figure 1b It is a flowchart of a method for determining position coordinates of a base station provided in Embodiment 1 of the present invention. This embodiment is applicable to situations where the method can be executed by the device for determining the location coordinates of the base station provided in the embodiment of the present invention. The device can be implemented in software and / or hardware, and can generally be integrated in mobile devices. For example, mobile robots. Such as Figure 1b As shown, the method of this embodiment specifically includes:
[0032] Step 101. Obtain distances between a first measurement location and at least three base stations.
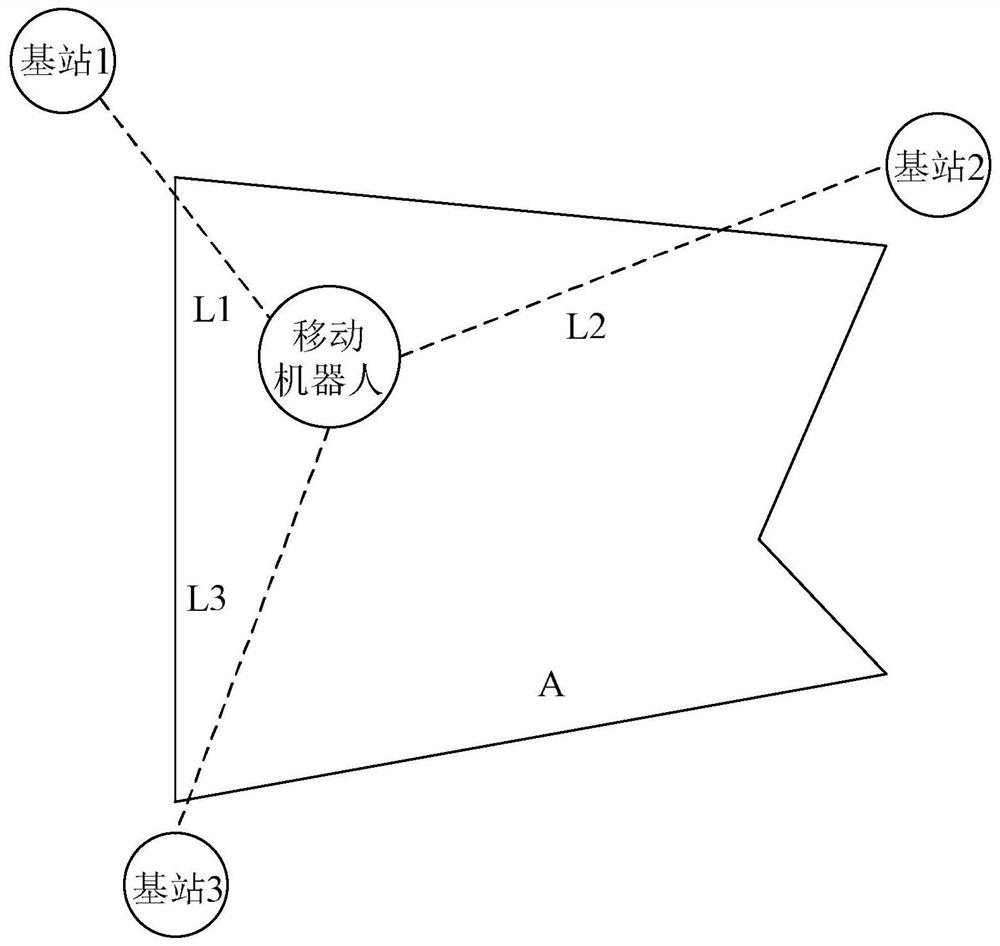
[0033] Among them, there are electronic boundaries (for example, the electronic boundaries on the lawn where the lawn mower robot operates) or physical boundaries (for example, the walls of the vacuum cleaner robot) on the field where the self-mobile device works. Since the mobile device operates a...
Embodiment 2
[0071] Figure 2a It is a flowchart of a method for determining position coordinates of a base station provided in Embodiment 2 of the present invention. This embodiment may be combined with each optional solution in the foregoing one or more embodiments. In this embodiment, three base stations are arranged around the working site of the mobile device.
[0072] Correspondingly, such as Figure 2a As shown, the method of the present embodiment includes:
[0073] Step 201. Obtain the distances between the first measurement location and the three base stations.
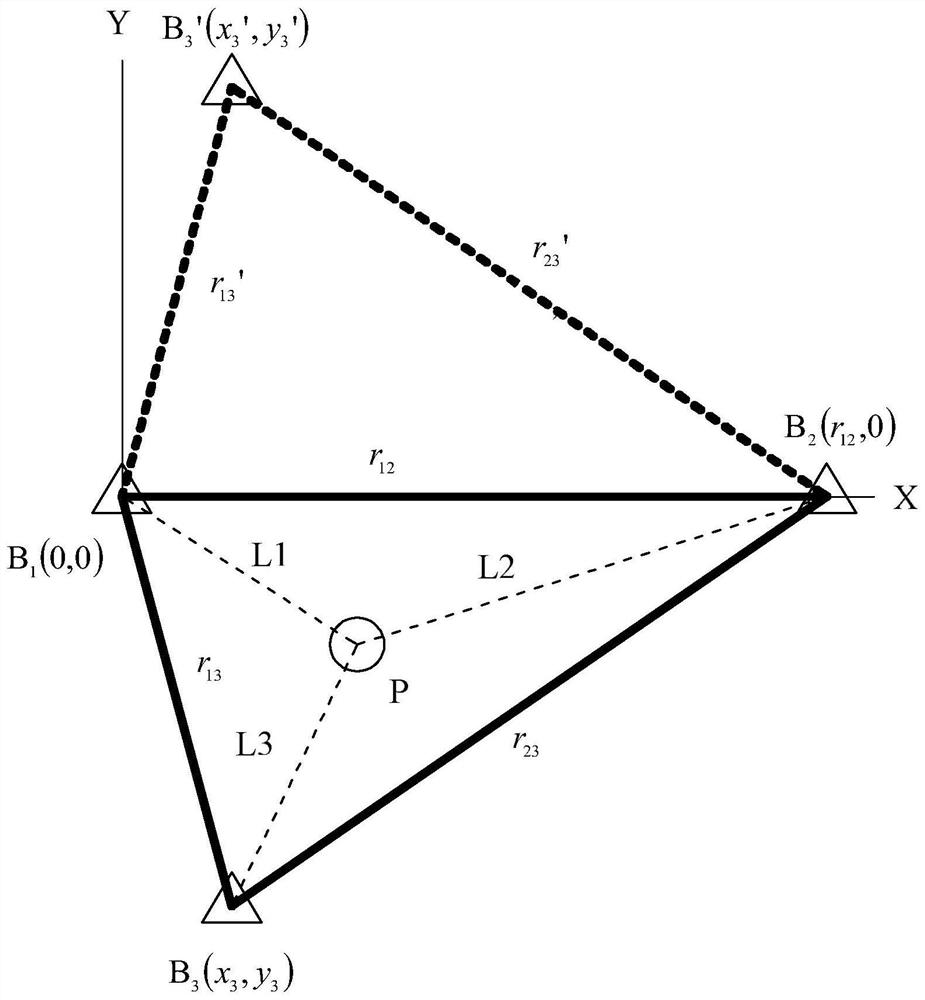
[0074] Among them, such as Figure 2b As shown, three base stations are set up near the site where mobile equipment works: B 1 , B 2 , B 3 . During the establishment of the base station coordinate system, base station B 1 The location coordinates (x 1 ,y 1 ), base station B 2 The location coordinates (x 2 ,y 2 ) and base station B 3 The location coordinates (x 3 ,y 3 ) is the quantity to be requested.
...
Embodiment 3
[0089] Figure 3a It is a flowchart of a method for determining position coordinates of a base station provided by Embodiment 3 of the present invention. This embodiment can be combined with various optional solutions in one or more of the above embodiments. In this embodiment, after determining the position coordinates of each base station in the plane Cartesian coordinate system, it may further include: according to the third moving route by The fourth measurement position walks the third distance along a straight line to the fifth measurement position, and obtains the distance between the fifth measurement position and each base station; according to the preset position deviation, the set number of steps, and the current position of each base station Coordinates, determine at least one reference position coordinate corresponding to each base station respectively; According to at least one reference position coordinate respectively corresponding to each base station, and the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com