

Adaptive staggered reinforcement learning method of DT affine nonlinear system based on matching or mismatching uncertainty
An affine nonlinear and uncertain technology, applied in the field of industrial control, can solve problems such as complex nonlinear characteristics
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
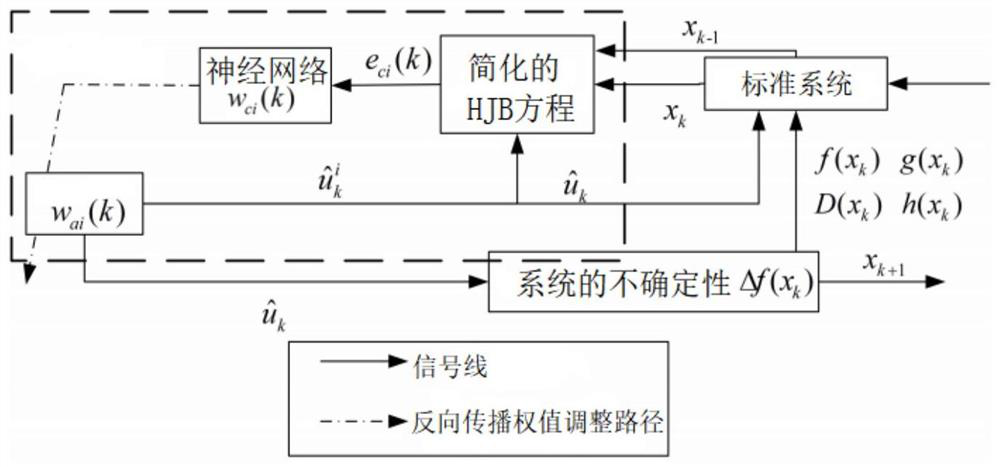
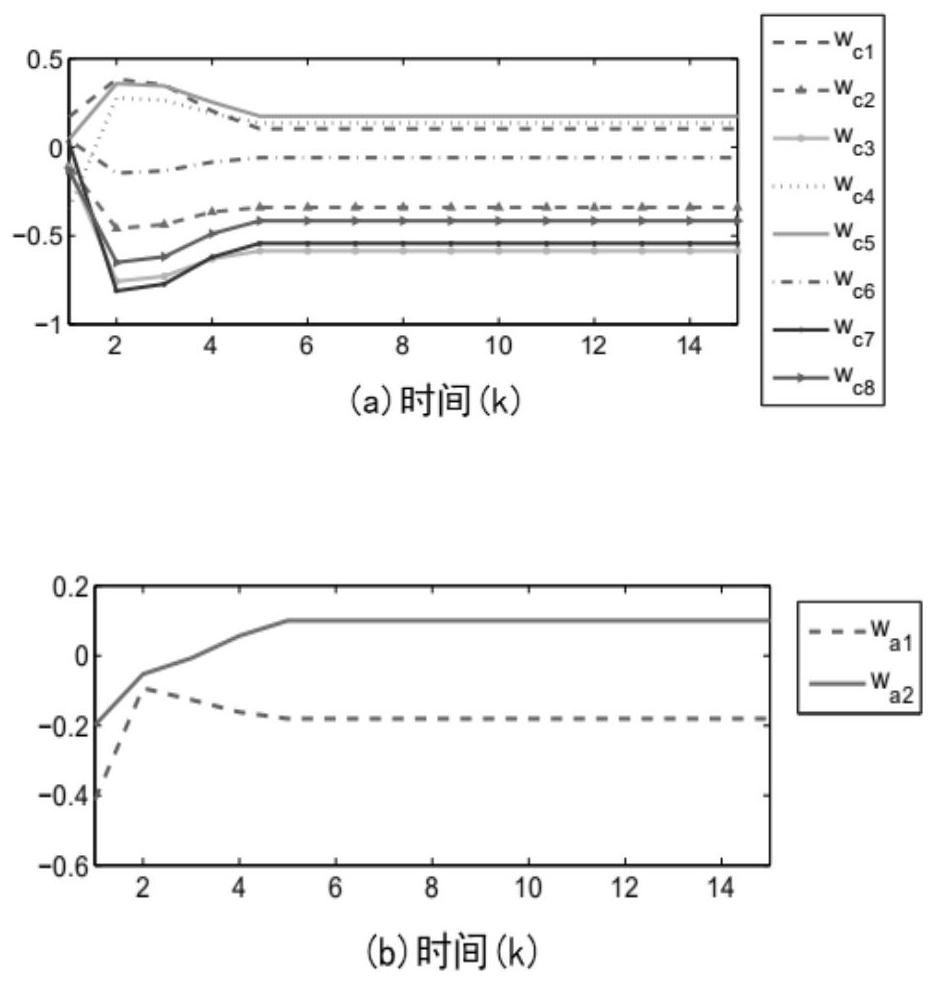
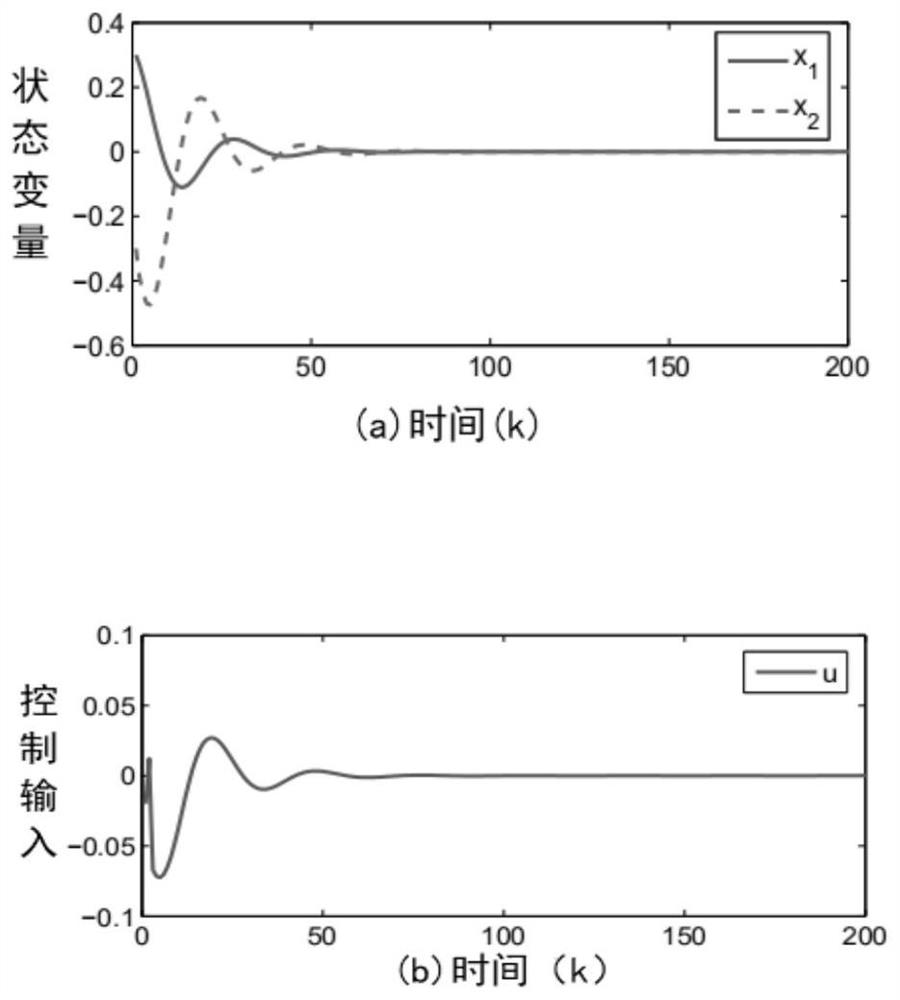
[0075] An adaptive interleaved reinforcement learning method based on matching or mismatching uncertain DT affine nonlinear systems, by selecting an appropriate utility function, the robust control problem is transformed into the optimal control problem of the standard system, and the simplified For the HJB equation, performance evaluation and control strategy update are alternately implemented at each time step, combined with neural network approximation, so as to ensure the uniform ultimate bounded (UUB) stability of the DT affine nonlinear system, allowing all unknown bounded uncertainties realization. The convergence of the proposed interleaved RL method and the UUB stability of uncertain systems are rigorously proved; the specific steps are as follows: (1) Based on the problem of optimal control, the matched and mismatched uncertain DT affine non- Robust Stability Conditions for Linear Systems. (2) Interleaved RL combined with neural network approximation is proposed to ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More