

Unmanned ship hybrid sensing autonomous obstacle avoidance method and system based on reinforcement learning
A reinforcement learning, unmanned boat technology, applied in control/adjustment systems, two-dimensional position/channel control, instruments, etc., can solve the problem of difficult to adapt to large-scale complex environments, cumbersome, intelligent algorithms for unmanned boats Realize complex problems and achieve the effect of reliable and stable threat evasion capability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
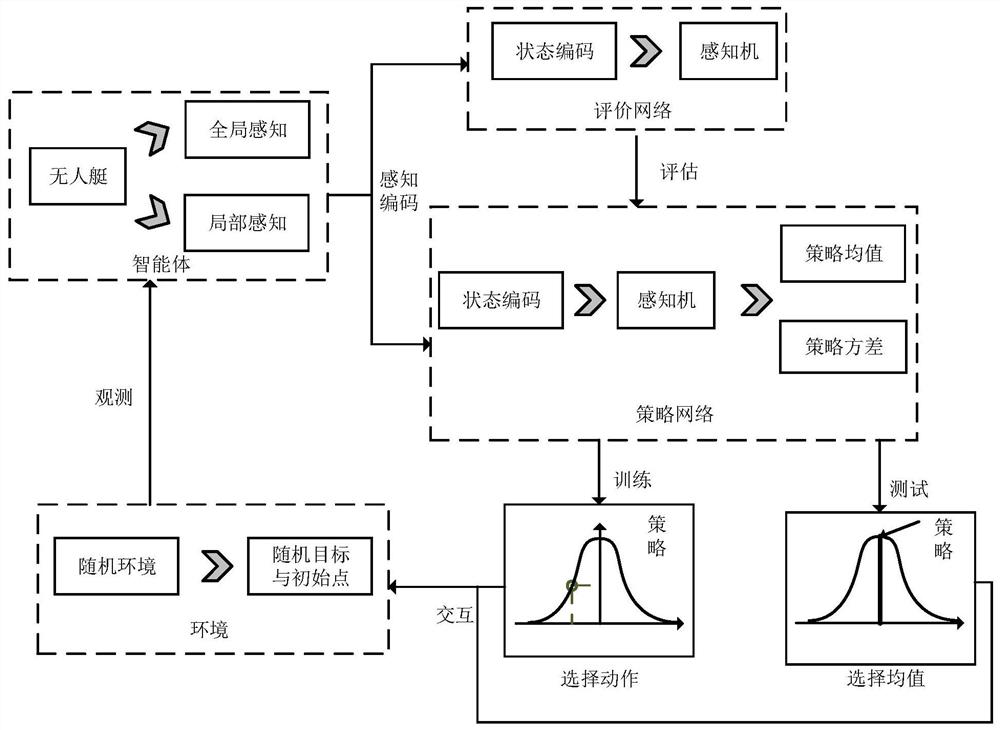
[0037] Such as figure 1 As shown, a method for unmanned vehicle hybrid perception autonomous obstacle avoidance based on reinforcement learning, the method includes the following steps:
[0038] 1) Build the ocean environment: establish interaction rules between the unmanned boat and the ocean environment, generate random obstacles, and randomly generate the starting point and end point of the unmanned boat;
[0039] The interaction rules between the unmanned vehicle and the marine environment follow the dynamic equation of the unmanned vessel itself:
[0040]
[0041]
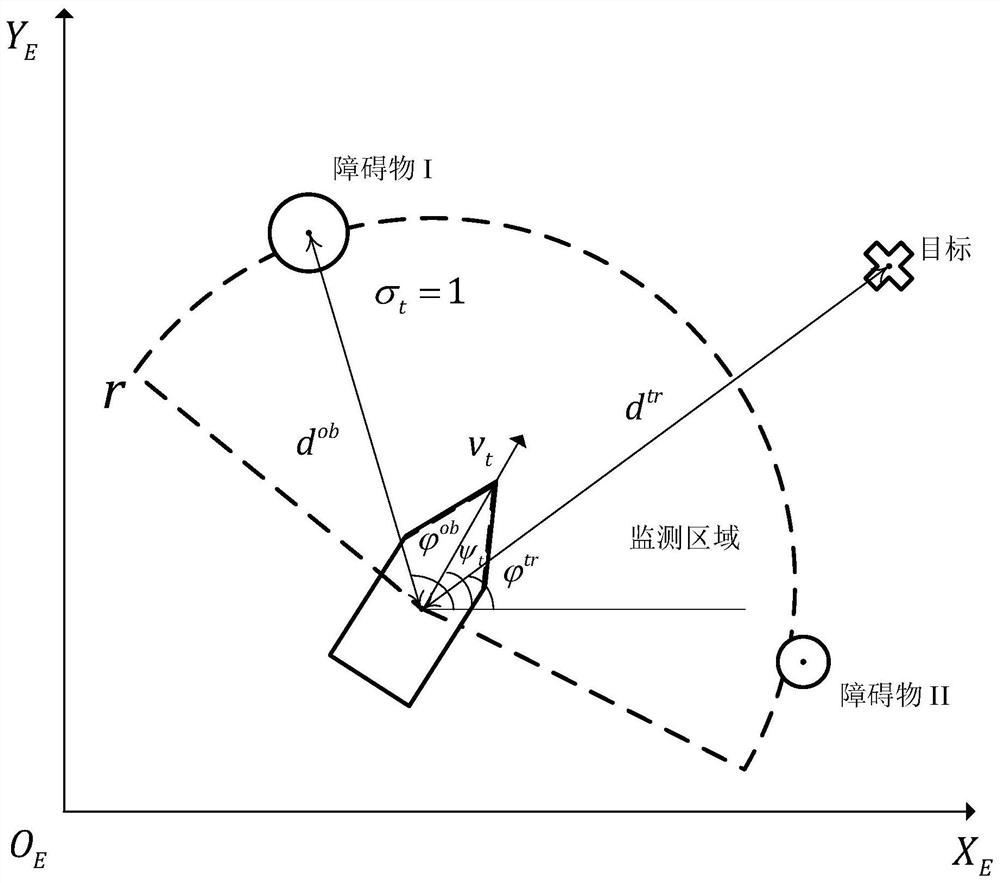
[0042] where, η=[x,y,ψ] T Contains the position and yaw angle information of the UAV, v=[u,υ,r] T Contains sway, surge, and yaw velocity information, τ=[τ u ,0,τ t ] T is the surge force and yaw force of the unmanned boat, M is the mass of the unmanned boat, R(ψ) is the function of the yaw angle ψ, C(v) and g(v) are the functions of v respectively;
[0043] The generated random obstacles include 4 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More