

Workpiece 6D pose estimation method based on deep learning
A pose estimation and deep learning technology, applied in computing, image data processing, instruments, etc., can solve problems such as limited real-time performance, difficult to guarantee accuracy, and limited accuracy of pose estimation, achieving fast real-time accurate estimation and easy processing Effects of occlusion, improving accuracy and efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0049] In order to make the above objects, features and advantages of the present invention more comprehensible, the technical solutions of the present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments. It should be pointed out that the described embodiments are only a part of the embodiments of the present invention, rather than all embodiments. Based on the embodiments of the present invention, all those skilled in the art can obtain without creative work. Other embodiments all belong to the protection scope of the present invention.
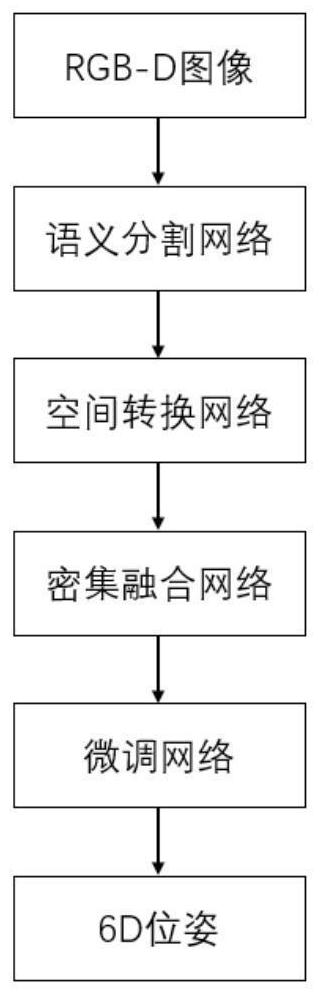
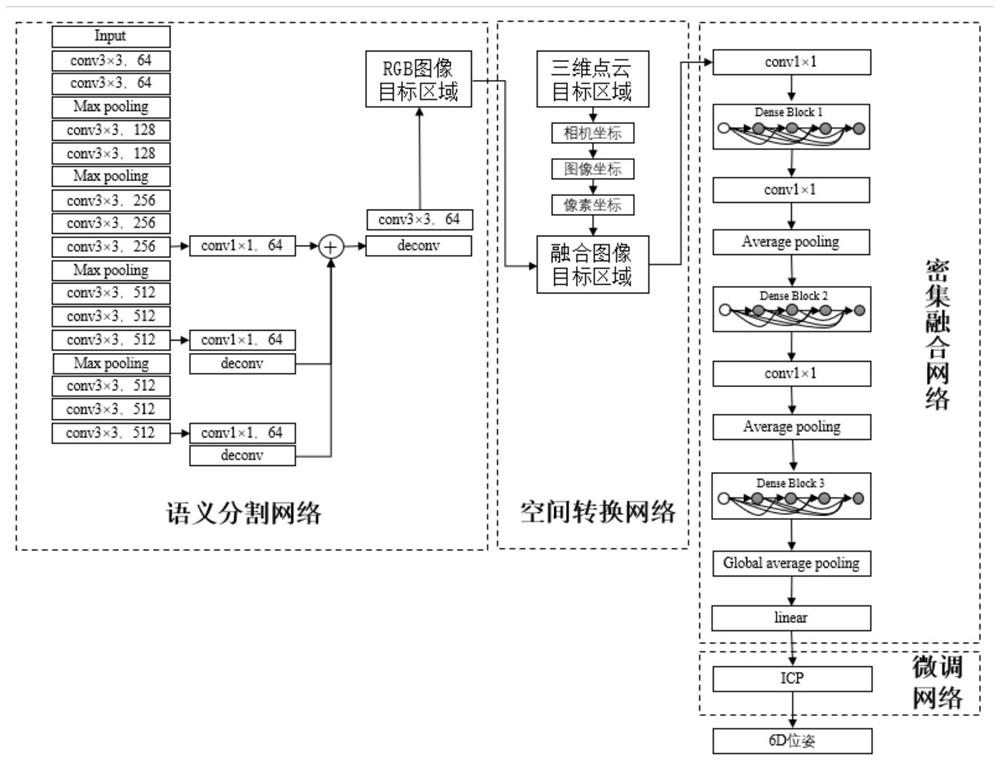
[0050] Such as figure 1 and figure 2 As shown, the present invention provides a method for estimating the 6D pose of a workpiece based on deep learning, comprising the following steps:
[0051] Step S1: image acquisition and preprocessing;
[0052] Specifically include the following steps:
[0053] Step S101: Use the depth camera to collect images of different workpieces und...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More