

Automatic measuring method and network system of measuring robot for fully mechanized mining face
A technology for measuring robots and fully mechanized mining faces. It is applied in the computer field and can solve the problems of long and time-consuming north-seeking gyro total stations and high prices of gyro total stations.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] In order to make the above objects, features and advantages of the present invention more comprehensible, the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
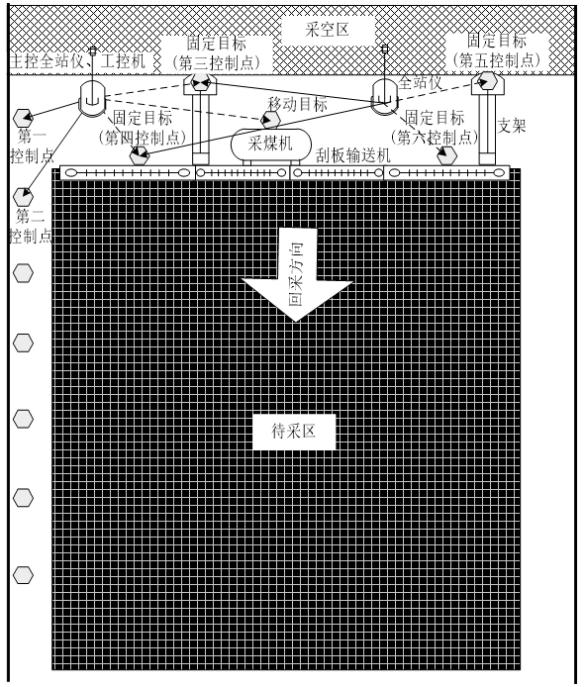
[0037] The idea of the present invention is to arrange the control point marks in advance in the roadway of the fully mechanized mining face, measure the geodetic coordinates corresponding to the control point marks in advance, and construct a total station instrument group measurement and control network in the fully mechanized mining face.
[0038] Firstly, the geodetic coordinates of the main control total station are determined based on any two control points in the fully mechanized mining working face with known geodetic coordinates; then, at least two The geodetic coordinates of each target point, and the fixed target point with known geodetic coordinates as the new control point; finally, any two fixed target points with f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More