Human skeleton action prediction method based on multi-task non-autoregressive decoding
A technology for human skeleton and action prediction, applied in the field of computer vision, can solve the problem of not considering the prediction error and so on
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
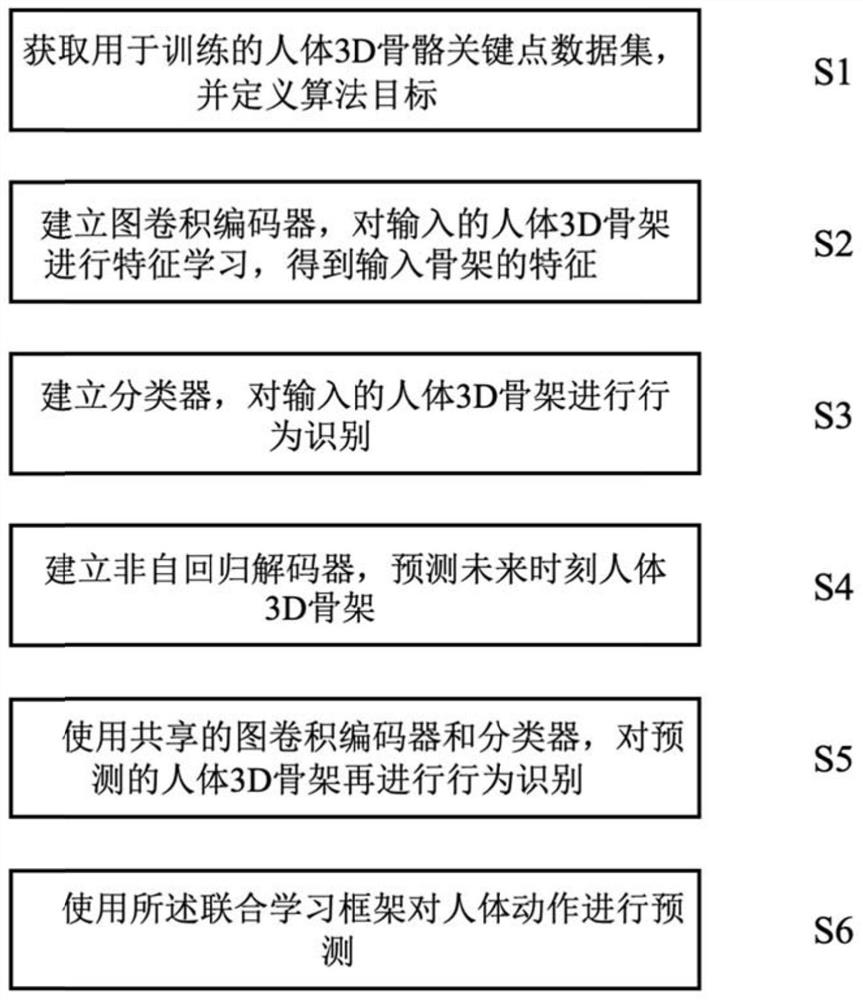
[0098] The implementation method of this embodiment is as described above, and the specific steps will not be described in detail. The following only shows the effect of the case data. The present invention is implemented on two data sets with ground-truth labels, namely:
[0099] Human3.6M dataset: This dataset contains about 3,600,000 human 3D poses, including about 15 actions;
[0100] CMU Mocap dataset: This dataset contains about 86,000 human 3D poses, which contain about 8 actions.
[0101] In the above prediction method, the parameters are set as follows N=25, T 1 =50,T 2 =10~25. Finally, the results of the method of this embodiment (referred to as mNAT) on the two data sets are shown in Tables 1 and 2, and the results of some methods in the prior art are also listed in the table for comparison.
[0102] Table 1. Comparison of evaluation indicators in this embodiment on the Human3.6M data set
[0103]
[0104] Table 2. Comparison of evaluation indicators in this...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More