

Three-jaw manipulator having anti-skidding effect
A manipulator and anti-skid technology, applied in the field of manipulators, can solve the problems of increasing labor costs, reducing production efficiency, and the lack of anti-skid measures for three-jaw manipulators, achieving a wide range of applications and ensuring the effect of clamping effect.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] In order to enable those skilled in the art to better understand the present invention, the technical solution of the present invention will be further described below in conjunction with the accompanying drawings and embodiments.
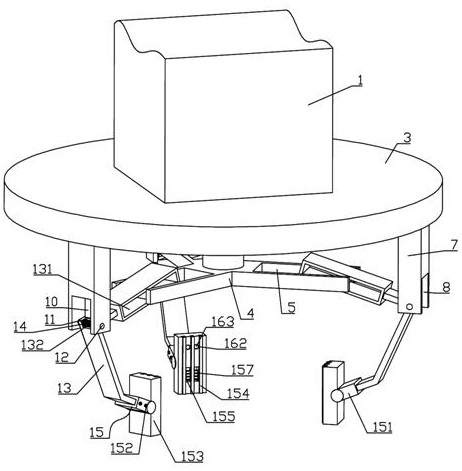
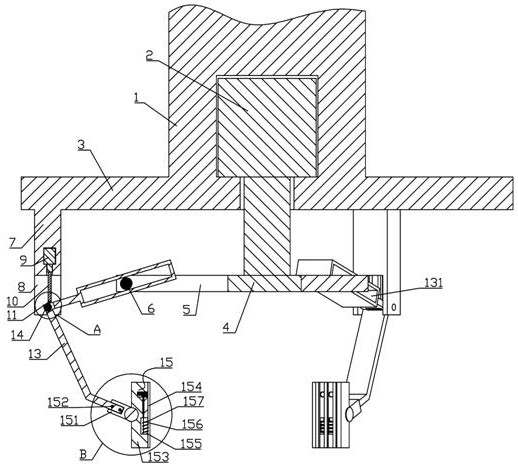
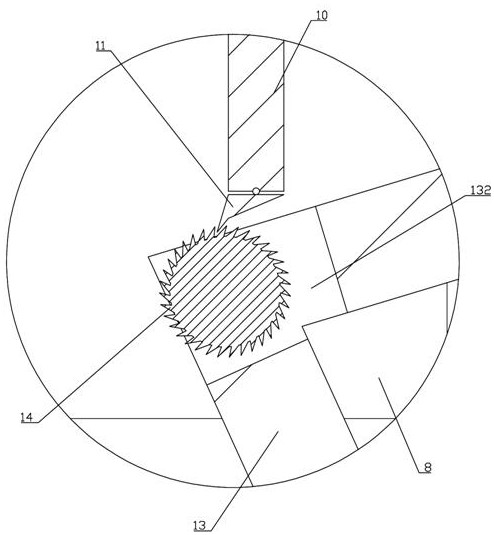
[0028] Such as Figure 1 to Figure 5 As shown, a three-claw manipulator with anti-slip effect of the present invention includes a connecting rod 1, a first telescopic cylinder 2 is installed inside the connecting rod 1, a mounting plate 3 is connected to the connecting rod 1, and the output end of the first telescopic cylinder 2 runs through A hinged plate 4 is connected behind the mounting plate 3, and the hinged plate 4 is provided with three first notches 5, and the three first notches 5 are all connected with pillars 6, and the mounting plate 3 is integrally connected with three positions corresponding to the first notches 5. The column 7, the column 7 is provided with a second notch 8, the second telescopic cylinder 9 is installed in th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More