

Multi-joint tabletop mechanical arm
A robotic arm, multi-joint technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of volume and weight increase in the weight of each arm, increase in the weight and moment of inertia of each arm, and increase in power and torque requirements. Increases payload, improves athletic performance, compensates for own weight
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The present invention will be further described in detail below in conjunction with the embodiments shown in the accompanying drawings.
[0020] In this embodiment, the rotating power components all adopt motors, the front sprocket and the rear sprocket adopt synchronous wheels, and the chain belt adopts synchronous belts.
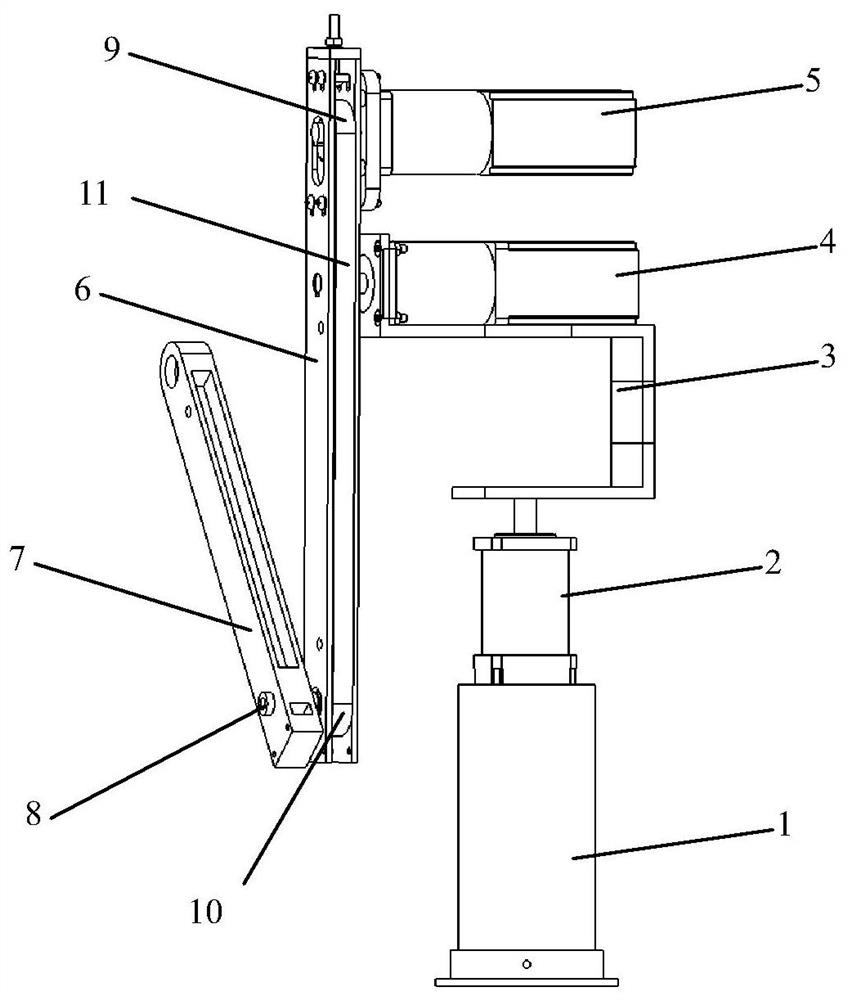
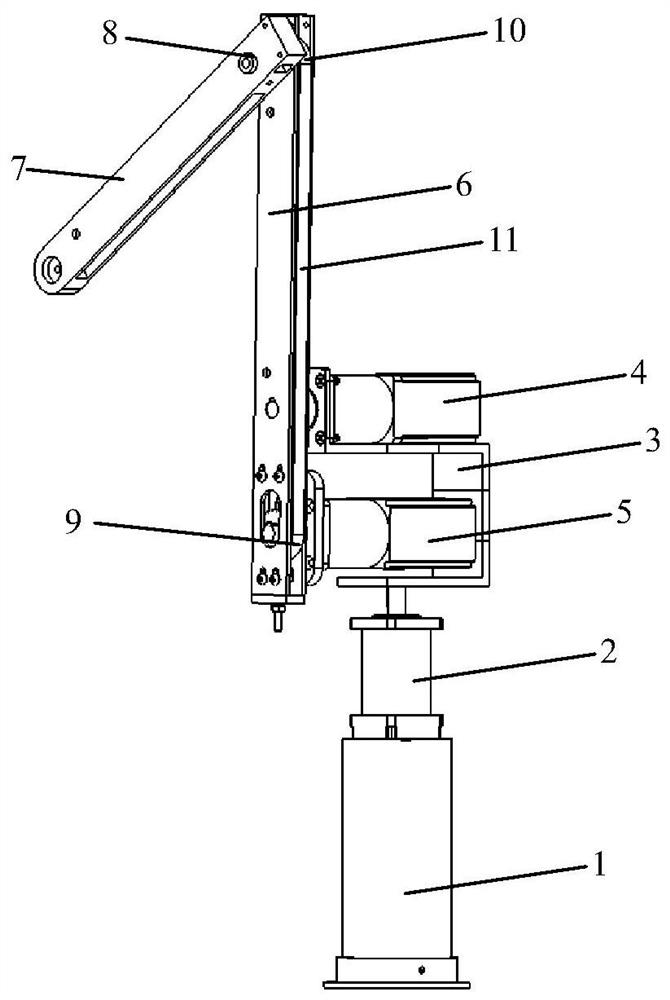
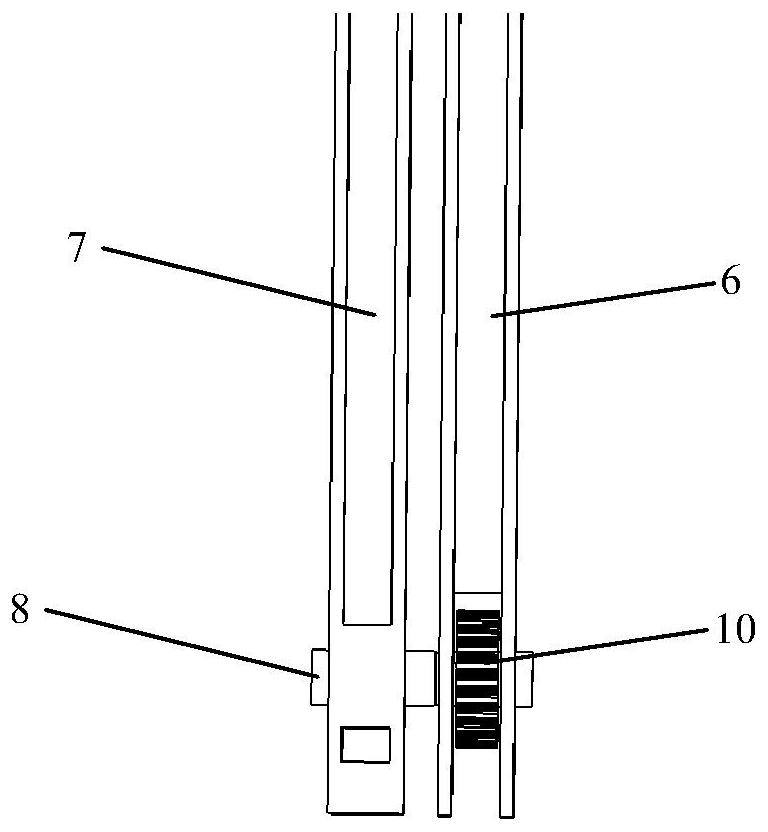
[0021] refer to figure 1 , figure 2 , image 3 As shown, in addition to the base and the base motor (that is, the power part of the base), the articulated mechanical arm provided by this embodiment mainly includes a bow frame, a boom motor, a small arm motor, a boom arm body, and a small arm arm. Body, large and small arm connecting shaft, front synchronous wheel, rear synchronous wheel, synchronous wheel belt.
[0022] The base motor is fixed on the base, and the shaft axis of the base motor is vertically arranged and connected to the bottom of the bow frame (as preferred, the vertical plane at the bottom of the bow frame is at the shaft axis o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More