

Complex multi-body device motion interference detection method
A technology of interference detection and motion interference, applied in image data processing, 3D modeling, instruments, etc., can solve the problems of increased detection time, time-consuming, limited detection accuracy, etc., and achieve the effect of improving efficiency and ensuring the range of motion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The present invention will be described in detail below with reference to the accompanying drawings and examples.
[0020] The present invention provides a complex multi-body device motion interference detection method, which specifically includes the following process:
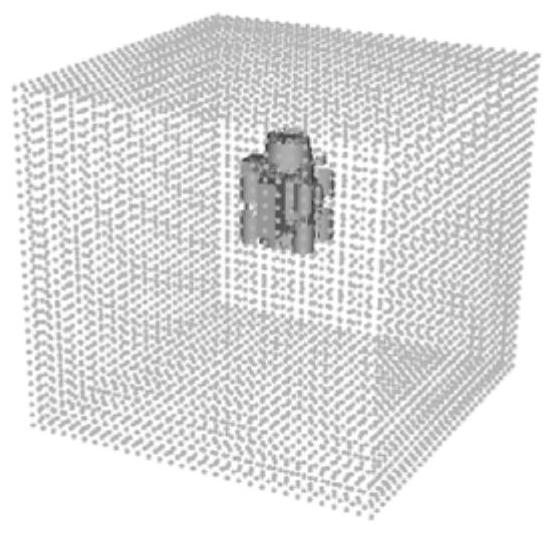
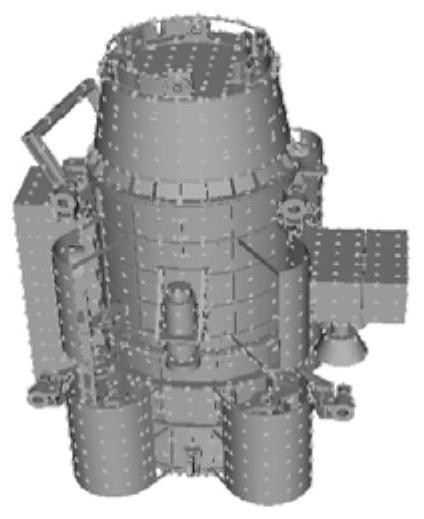
[0021] (1) Model scatter processing
[0022] For multi-degree-of-freedom multi-body devices, taking the mechanical arm as an example, because there is relative motion between the connecting rods, it is necessary to scatter the model of each connecting rod separately. In order to facilitate the update of the coordinates of each scattered point after joint movement, the origin of each D-H coordinate system is taken as the origin when scanning the scattered points. For each static object in the environment, only the overall model needs to be processed.
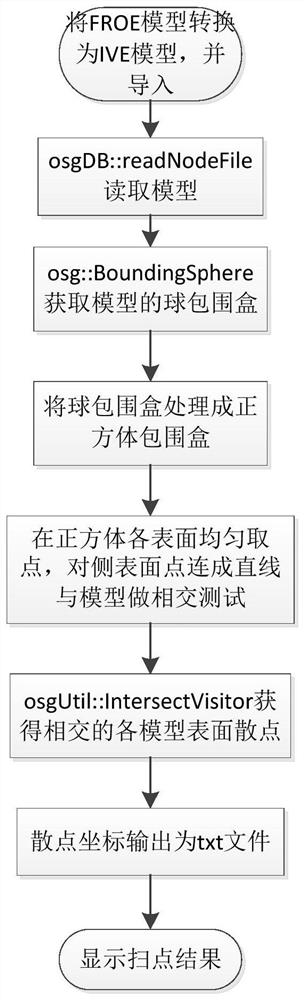
[0023] Such as figure 1 As shown, the specific process of model scatter processing is as follows:
[0024] 1) Import the model. Read the 3D models o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More