Flexible exoskeleton robot control method and system based on muscle coordination theory
An exoskeleton robot, the technology of synergy theory, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problems of difficult to achieve human-machine coordinated motion, inaccurate recognition of human intentions, slow response time, etc., to meet the requirements of hardware Low cost, less computation, and improved comfort
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0065] The present invention will be described in detail below in conjunction with specific embodiments. The following examples will help those skilled in the art to further understand the present invention, but do not limit the present invention in any form. It should be noted that those skilled in the art can make several changes and improvements without departing from the concept of the present invention. These all belong to the protection scope of the present invention.
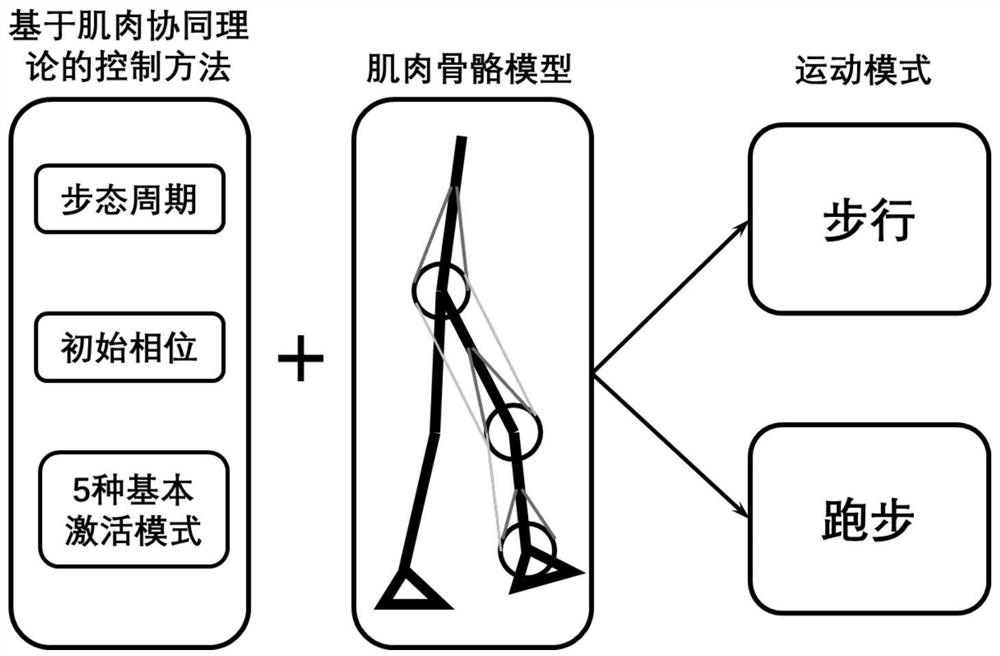
[0066] The invention belongs to the field of robot control, in particular to a method for controlling a flexible exoskeleton robot based on muscle synergy theory. According to the characteristics of flexible exoskeleton without rigid structure, the system proposes an effective control scheme for flexible cable drive.
[0067] The overall system block diagram is as figure 1 .
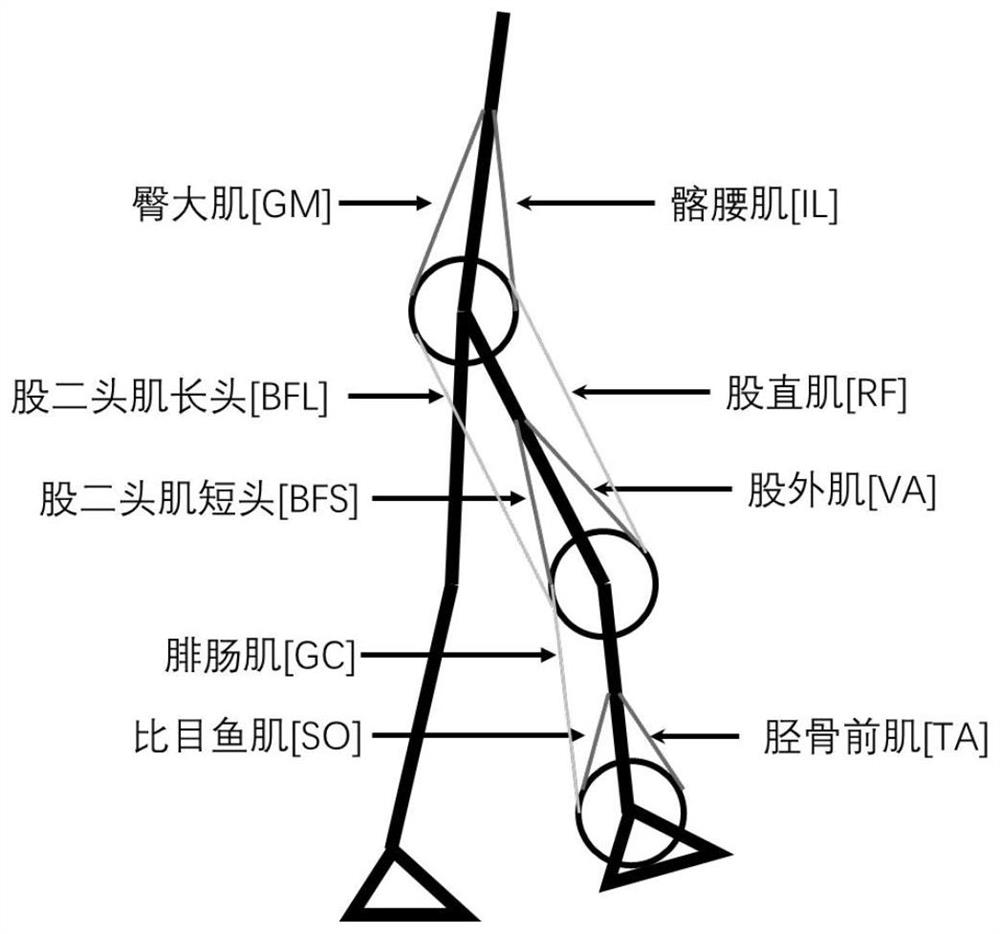
[0068] According to the simplified skeletal muscle model of a kind of people's lower limbs provided by the present invention s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More