

Symmetrical rimless wheel model motion behavior adjusting method based on motion stopping attraction domain
An adjustment method and technology of attracting domain, which can be applied in the direction of motor vehicles, transportation and packaging, etc., and can solve the problems of difficulty in imitating human walking and controlling the movement law.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0064] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
[0065] Embodiments of the present invention are described in detail below in conjunction with accompanying drawings:
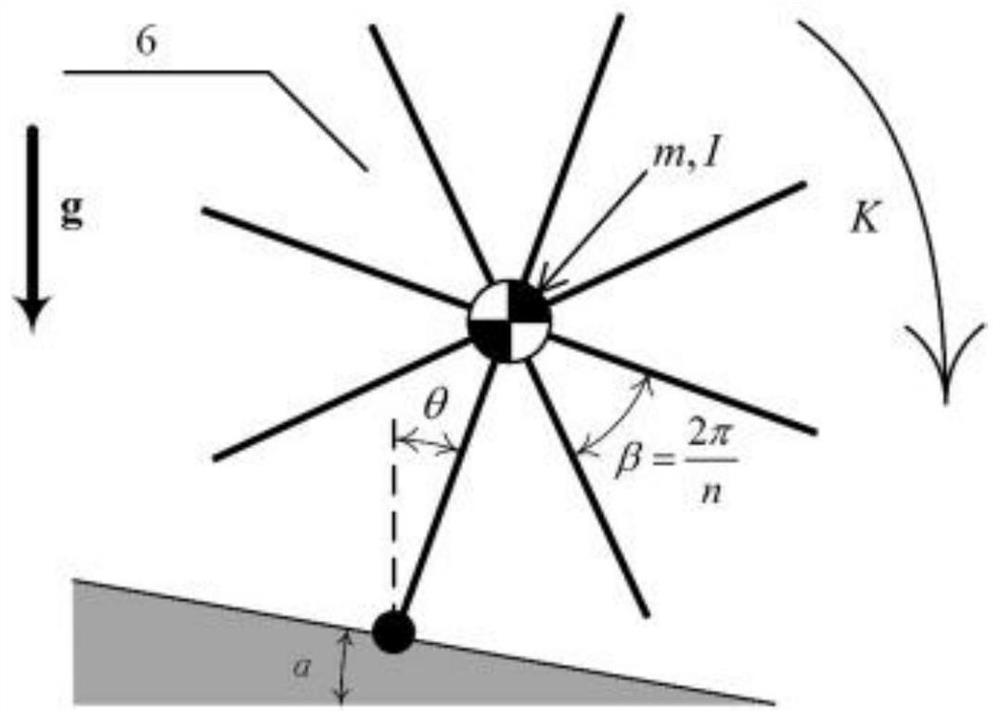
[0066] Such as figure 1 As shown, the symmetrical boundless wheel model 6 is a single wheel mechanism with only internal spokes, all the spokes are distributed symmetrically along the circumference, and the angle between adjacent spokes is β; the initial kinetic energy of the symmetrical boundless wheel model 6 is denoted as K 0 , the dimensi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More