Multi-communication-region full-coverage sweeping path planning method for unmanned sweeper
A multi-connected area and path planning technology, applied in cleaning methods, road surface cleaning, construction, etc., can solve the problems of algorithm efficiency reduction, consumption of computing resources, and large dependence on grid maps, etc., to ensure effectiveness, great practical significance, Guaranteed full coverage
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] In order to enable those skilled in the art to better understand the solution of the present invention, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
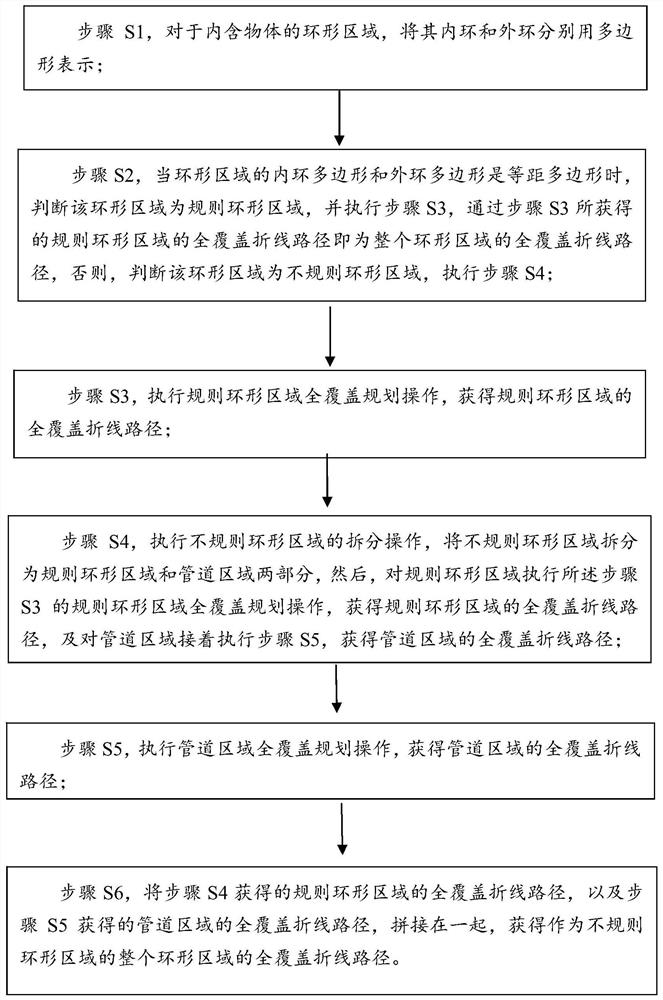
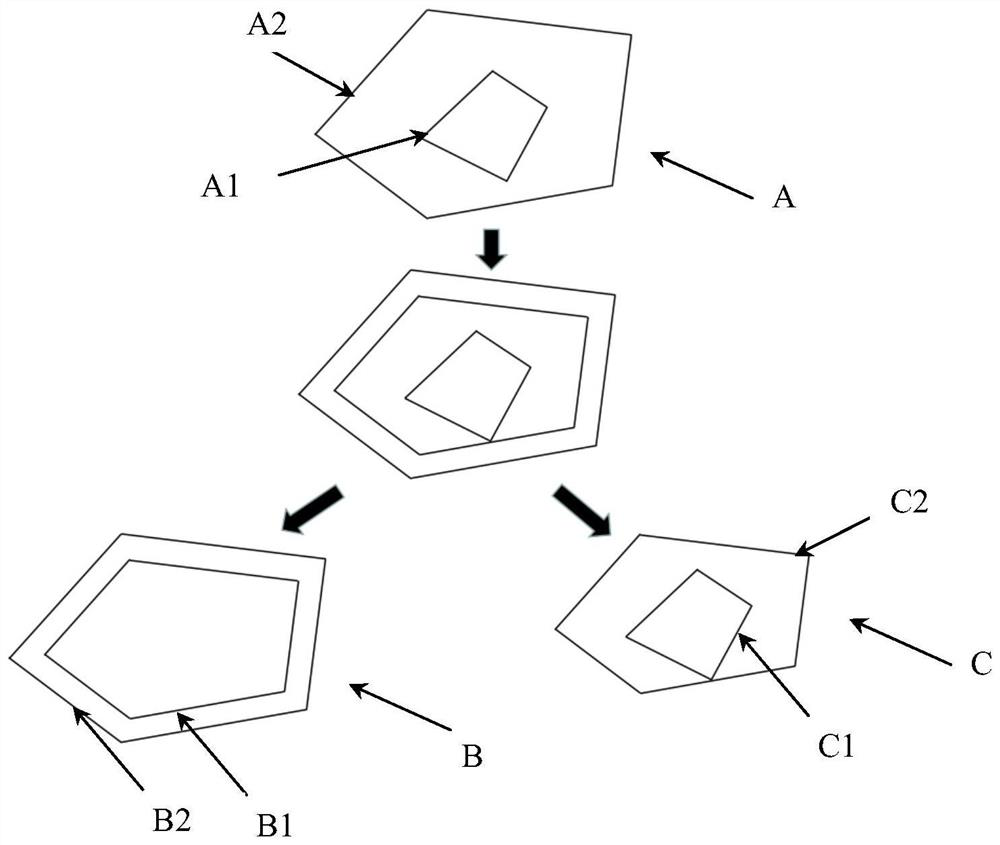
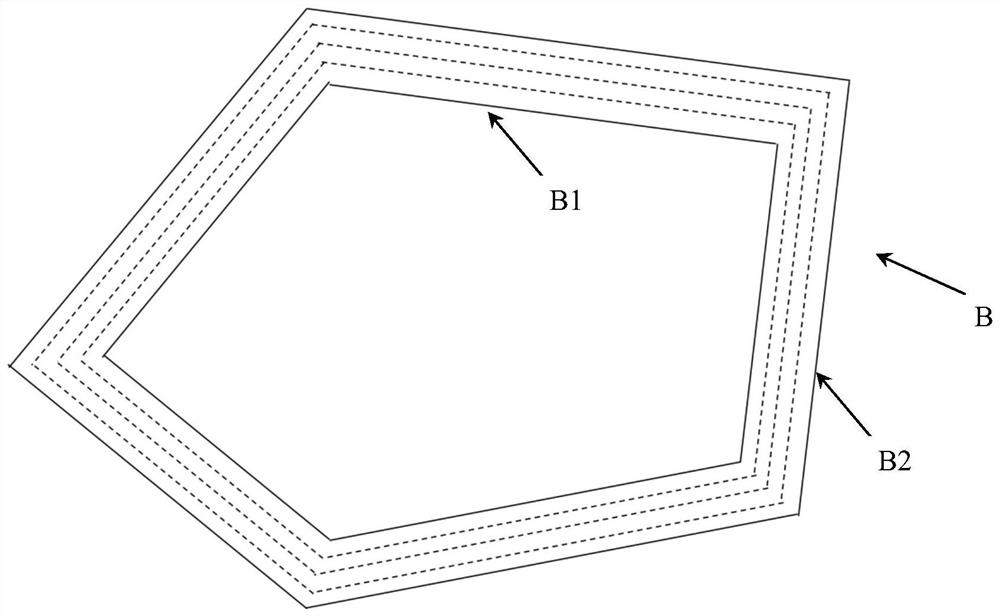
[0052] The present invention provides a cleaning path planning method for multi-connected areas of unmanned sweeping vehicles, the method is mainly aimed at circular areas, specifically multi-connected areas of approximate annular shape. The whole full-coverage path planning method includes four parts, including area splitting, full-coverage planning for regular ring areas, full-coverage planning for pipeline areas, and path optimization smoothing. The implementation process of the whole method is as follows figure 1 shown.
[0053] see figure 1 , the present invention provides a cleaning path planning method for multi-connected areas of an unmanned sweeping vehicle, including the following steps:
[0054] Step S1, for the ring-shaped are...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



