

A Hybrid Space-Based Transition Trajectory Planning Method for Industrial Robots
A trajectory planning, robotics technology, applied in manipulators, manufacturing tools, program-controlled manipulators, etc., can solve problems such as inability to transition smoothly
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
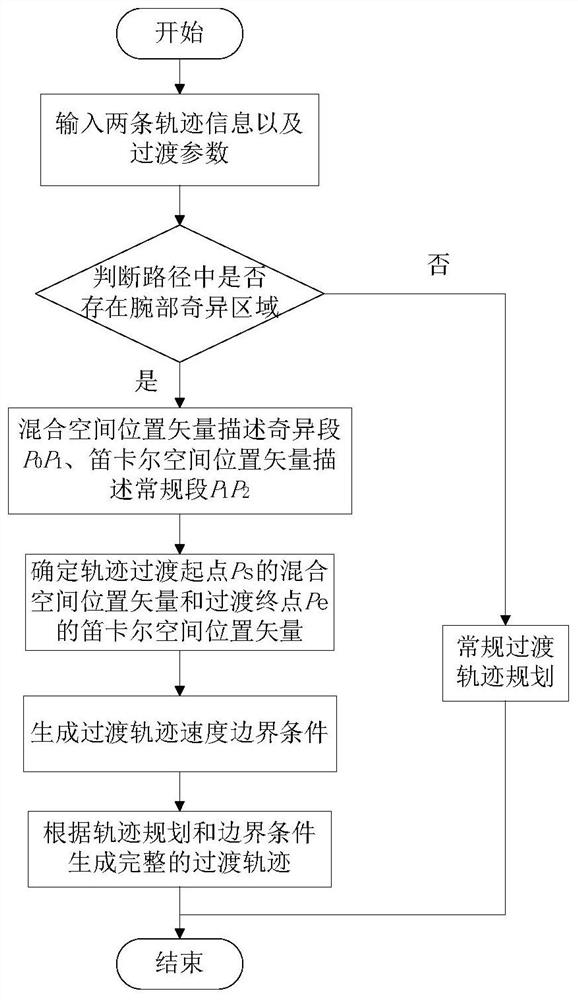
[0055] The specific implementation steps of the present invention are described below by taking the planning of two motion trajectories of a general six-joint robot as an example:
[0056] (1) Obtain motion parameters related to transition trajectory planning:
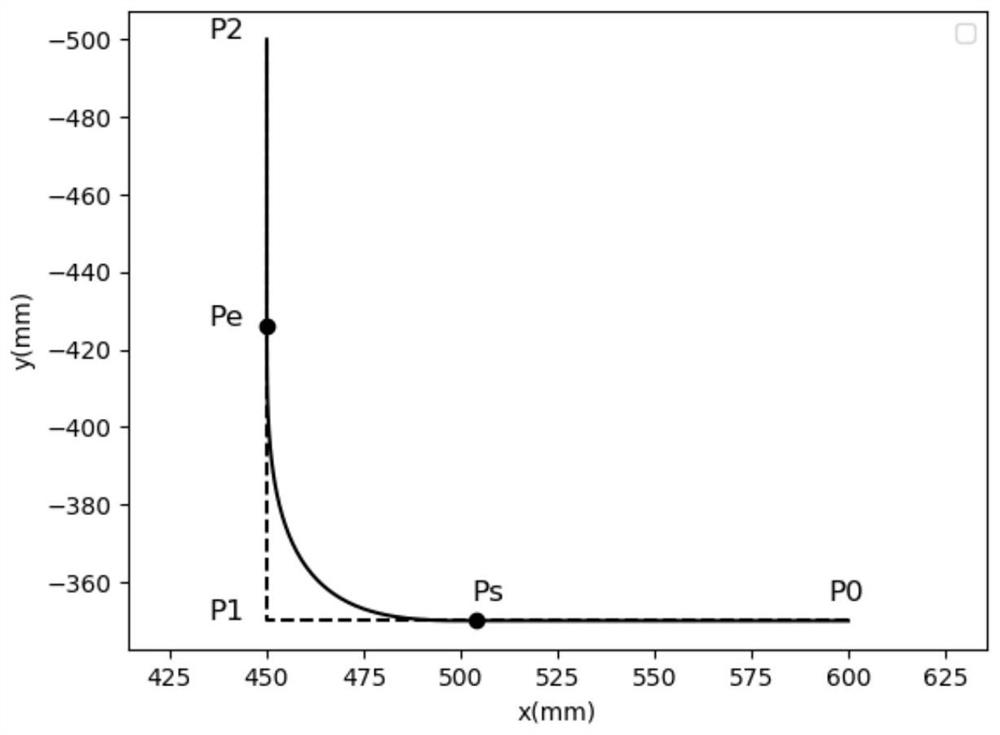
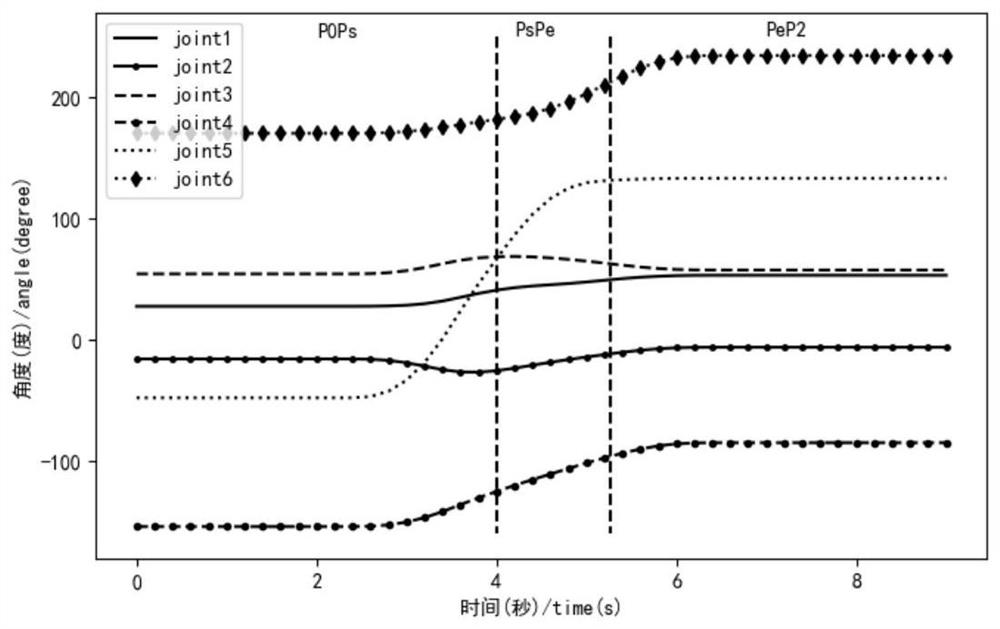
[0057] Teaching to get the starting point P of the first motion track 0 Pose data, end point P 1 Pose data, end point P of the second trajectory 2 The pose data are shown in the table below. Transition parameter a=0.8. Among them, P 0 P 1 is a singular segment motion path, and there is a singular area of the wrist in the motion path, P 1 P 2 is a general segment motion path.
[0058] point Cartesian space description joint space description P 0
[600,-350,680,-100,160,100] [27.87,-15.54,54.62,-153.86,-47.63,170.63] P 1
[450,-350,680,60,50,-120] [44.52,-18.03,68.39,-109.47,128.13,188.25] P 2
[450,-500,680,70,60,80] [53.50,-5.87,57.79,-84.64,133.5,234.84]
[0059] (2...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More