Method for fusing multiple groups of sensor data for obstacle avoidance in complex environment
A complex environment and sensor technology, applied in the field of robotics, can solve problems such as poor autonomy and reduce the efficiency of service robots, and achieve the effect of ensuring safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
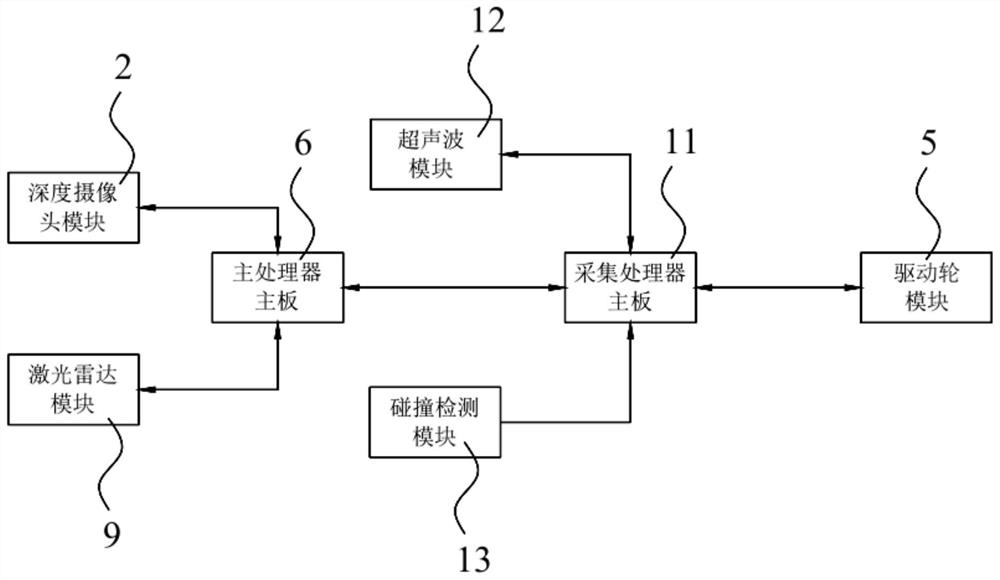
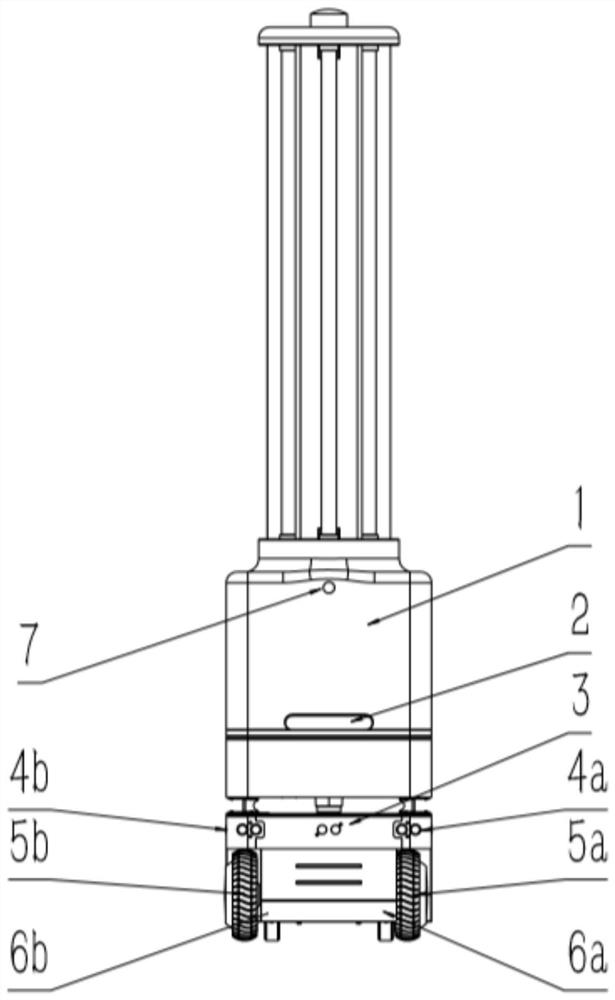
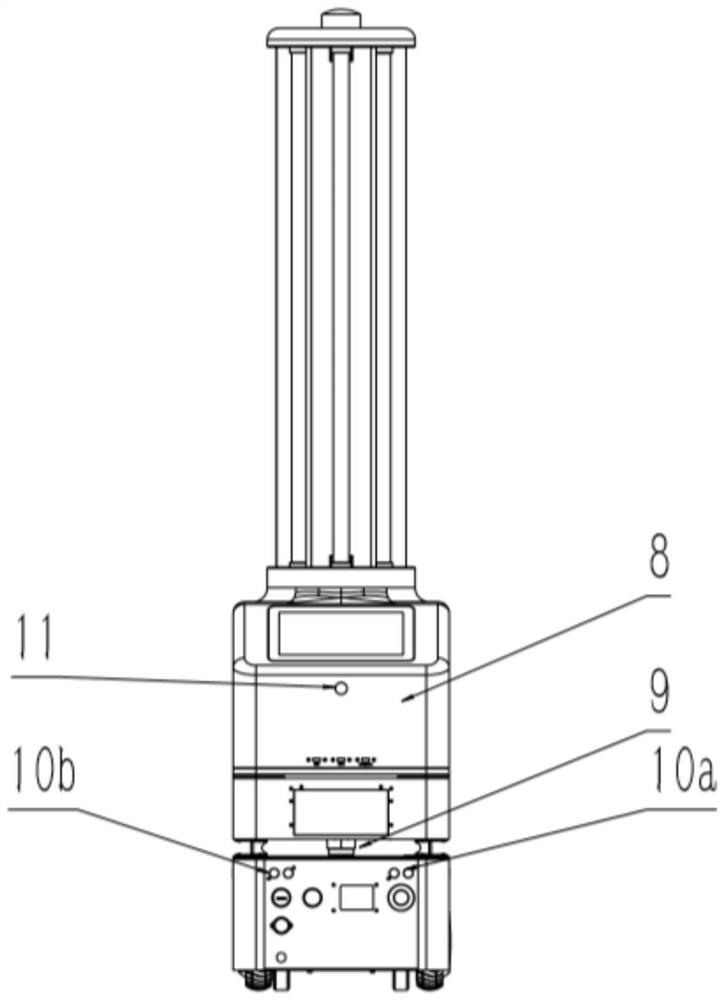
[0034] A robot that fuses multiple sets of sensor data to avoid obstacles in complex environments, such as Figure 1-3 As shown, it is a preferred embodiment of this technical solution, a service robot with obstacle avoidance function, including a plurality of shell structure parts, used to fix various components of the robot; driving wheel module 5, actuator, receiving Acquisition of the control signal of the processor main board 11; the main processor main board 6 is used to obtain the data of the depth camera module 2, the laser radar module 9 and the acquisition processor 4 and realizes the obstacle avoidance function; the acquisition processor main board 11 is used to obtain ultrasonic waves The data of the module 12 and the collision detection module 13 and send control information to the driving wheel module 5; the depth camera module 2 sends the distance, angle and height information of the obstacle to the main processor motherboard 6; the laser radar module 9 sends the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com