

Substation inspection robot system and obstacle avoidance method thereof
A technology for inspecting robots and substations, which is applied in manipulators, program-controlled manipulators, manufacturing tools, etc., and can solve problems such as lack of detection and normal connection.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
[0043] To achieve the above object, the technical scheme of the present invention is as follows:
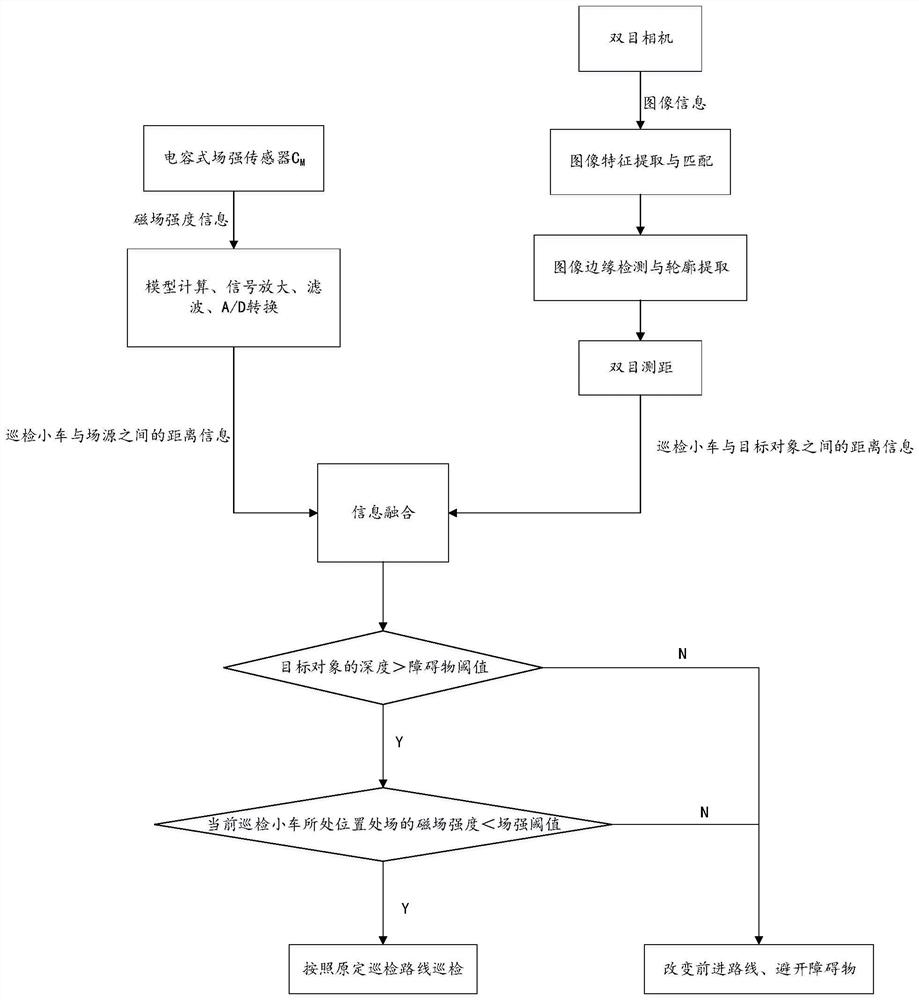
[0044] see figure 1 .
[0045] In this specific embodiment, a substation inspection robot system is provided, and the robot includes:
[0046] It has a carrying platform, an inspection trolley for carrying other components and driving along the ground to inspect the substation environment, a field strength sensor for real-time detection of electric field or magnetic field strength, an image collector for obtaining real-time images, and an inspection vehicle for A control center that analyzes the re...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More