

Inclined plane moving machine, multi-robot system and using method thereof
A technology for moving machines and inclined surfaces, applied in chemical instruments and methods, cleaning methods using tools, cleaning methods and utensils, etc., can solve the consumption of surface attachment devices, the increase in the incidence of failures, and the increase in the probability of falling from wall-climbing machines, etc. problems, to achieve the effect of reducing the intensity and difficulty of work, reducing the probability of failure, and eliminating the risk of working at heights
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
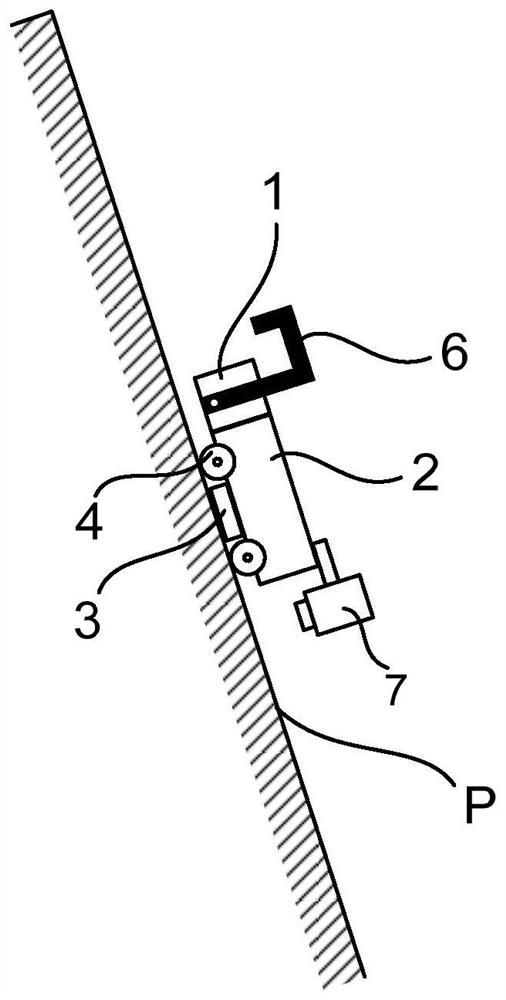
[0067] Please also refer to figure 1 as well as figure 2 Shown is the first embodiment of the structure and method of use of the inclined surface moving machine of the present invention.
[0068] The inclined surface moving machine of the present invention comprises a first split body 1, a second split body 2 and functional components. Functional components include surface attachment device 3 , moving mechanism 4 , flexible connection device and working tool 7 . The flexible connecting device includes a rope 5 and a rope driving mechanism. The rope driving mechanism in this embodiment is a rope winding mechanism (not shown in the figure) for winding the rope 5 . The first split body 1 is provided with a suspension mechanism. The suspension mechanism of this embodiment includes a rotating hook 6 hooked on the upper edge of the inclined surface P to form a connection relationship with the inclined surface P.
[0069] The work tool 7 installed on the second split body 2 is ...
Embodiment 2
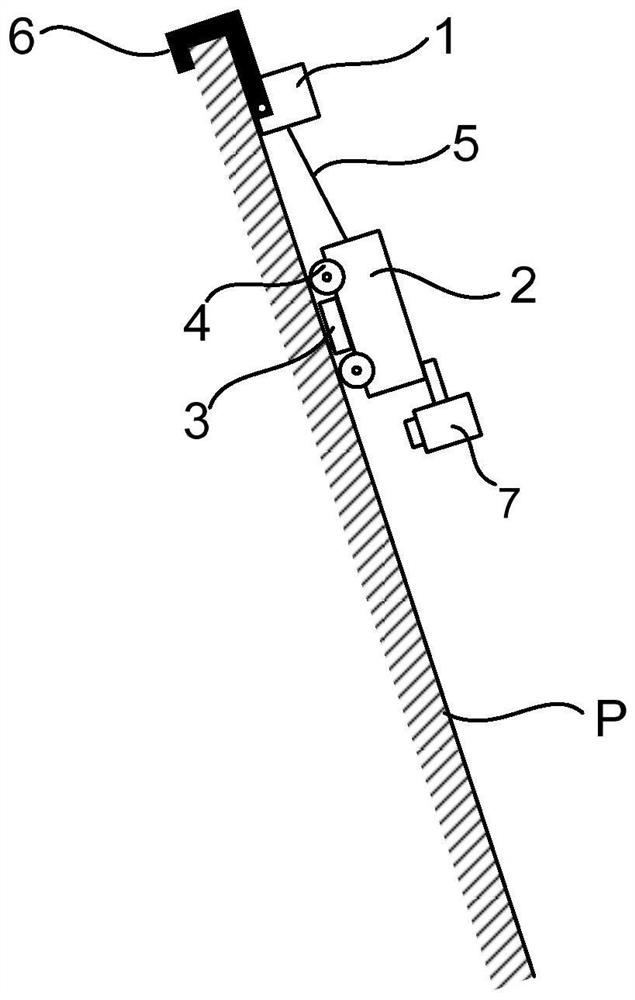
[0081] Please also refer to image 3 as well as Figure 4 Shown, the second embodiment of the structure and method of use of the inclined surface moving machine of the present invention.
[0082] In this embodiment, a moving mechanism 4 and a surface attachment device 3 are installed on the first split body 1 . A moving mechanism 4 and a working tool 7 are installed on the second split body 2 . Wherein, the moving mechanism 4 arranged on the first split body 1 includes a driving wheel with driving ability, and the moving mechanism 4 arranged on the second split body 2 can be a driven wheel without driving ability or a driven wheel with driving ability. driving wheel. The suspension mechanism includes a rotating hook 6 hooked on the upper edge of the inclined surface P to form a connection relationship with the inclined surface P.
[0083] Other structures and functions are the same as those in Embodiment 1 and will not be repeated here.
[0084] The present invention also...
Embodiment 3
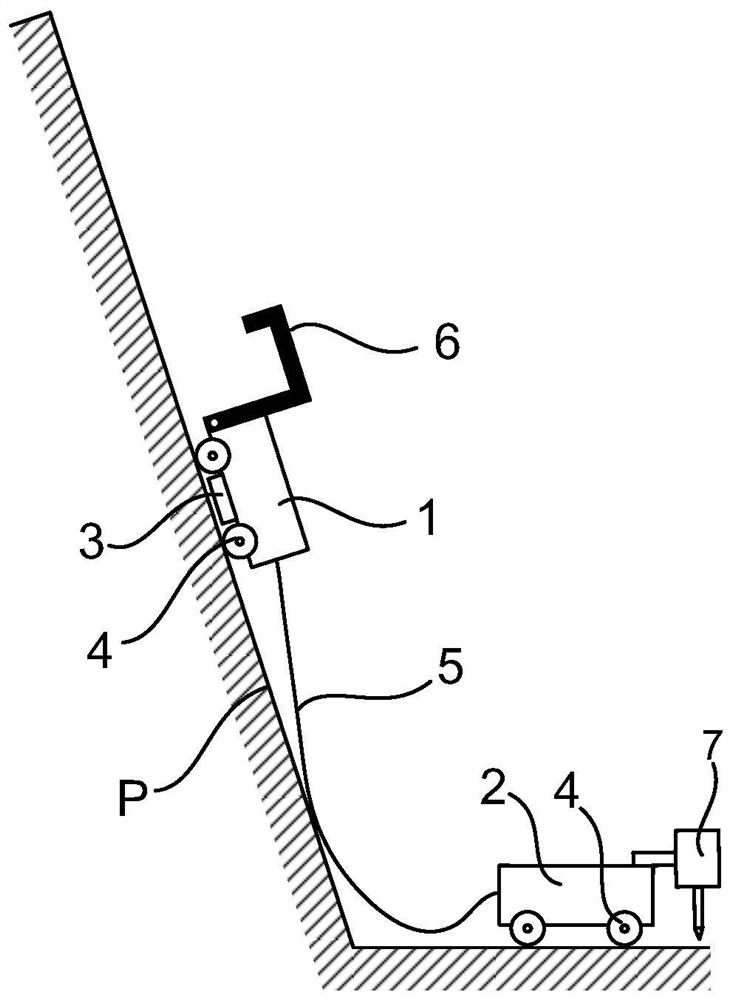
[0094] This example is another embodiment of Example 2. like Figure 5 As shown, the rope driving mechanism is a rope climbing mechanism (not shown) that can move along the rope 5 . There are many mechanisms that can achieve the function of moving along the rope. For example, if Image 6 As shown, the rope climbing mechanism includes two rope clamping wheels 8, which are installed on the second split body 2. Two clamping wheels 8 clamp the rope 5, and two clamping wheels 8 are as Image 6 Turning in the direction shown can make the second split body 2 move upwards along the rope 5 . The two rope clamping wheels 8 rotate in opposite directions, and the second split body 2 then moves down along the rope 5 .
[0095] Other structures and functions are the same as those in Embodiment 2 and will not be repeated here.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More