

Device and method for measuring axle distance of parking robot based on laser radar
A technology of laser radar and robot, which is applied in the direction of measuring device, radio wave measuring system, instrument, etc., can solve the problem that the parking robot cannot smoothly carry the vehicle, and achieve the effect of small error, high precision and simple structure of the device
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
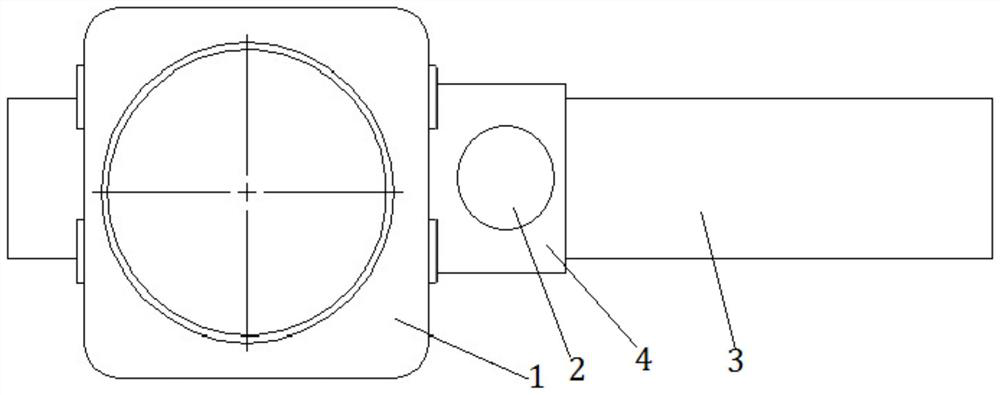
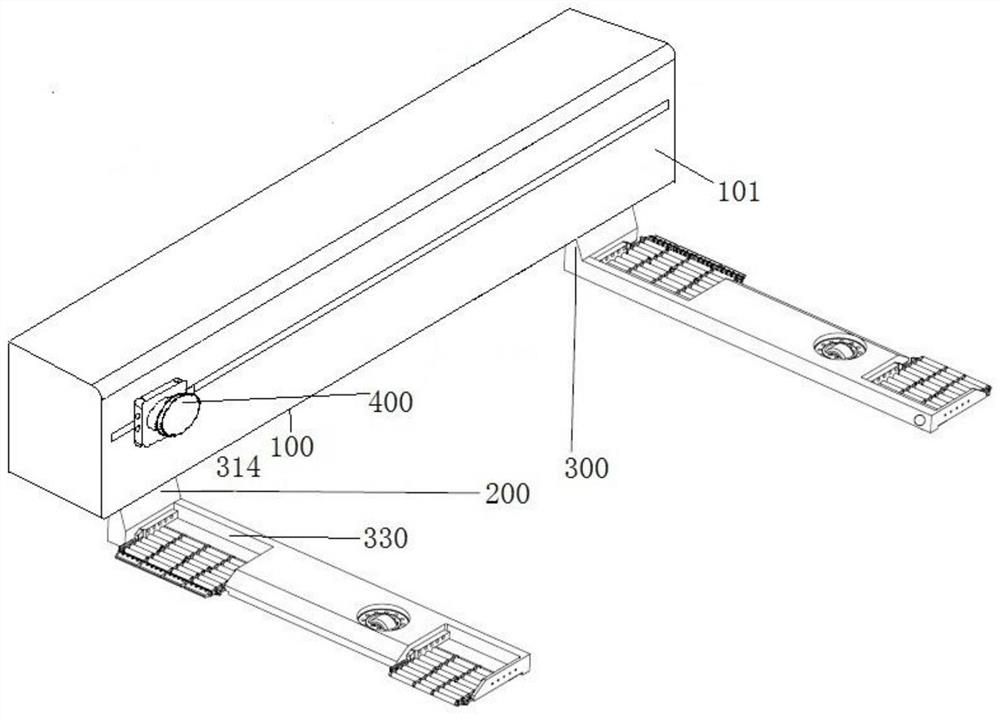
[0043] This embodiment relates to a device for measuring the wheelbase of a vehicle based on laser radar, such as figure 1 As shown, the device is installed on the parking robot; the device includes a track 3 installed on the main body of the parking robot parallel to the ground, and a laser radar 1 and a displacement sensor 2 that can slide simultaneously are arranged on the track 3 , the lidar 1 and the displacement sensor 2 slide on the track 3 through the slider 4; the testing direction of the lidar 1 is perpendicular to the track 3.
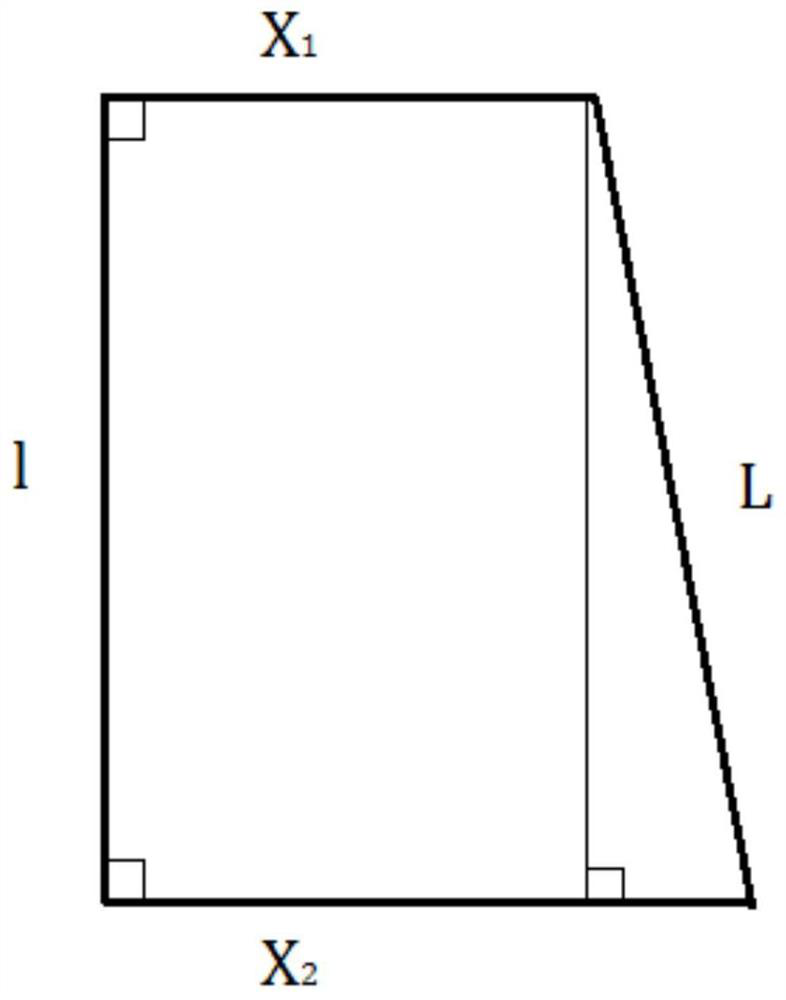
[0044] The method of measuring the vehicle wheelbase using the laser radar-based measuring vehicle wheelbase device in this embodiment, such as figure 2 As shown, the method includes:
[0045] S1: Slide the lidar and displacement sensor to one end of the track, and record it as the zero point of displacement;
[0046] S2: Start the lidar and displacement sensor, and drive the lidar and displacement sensor to slide, record the time, distan...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More