A Constrained Motion Planning Method for Space Dual-Arm System Based on Deep Reinforcement Learning
A technology that strengthens learning and constrains movement. It is applied in the direction of program-controlled manipulators, manufacturing tools, and manipulators. It can solve the problems of mechanical arm collision damage and poor versatility, and achieve the effect of improving safety and improving versatility.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0059] In order to facilitate the understanding of those skilled in the art, the present invention will be further described below in conjunction with the embodiments and accompanying drawings, and the contents mentioned in the embodiments are not intended to limit the present invention.
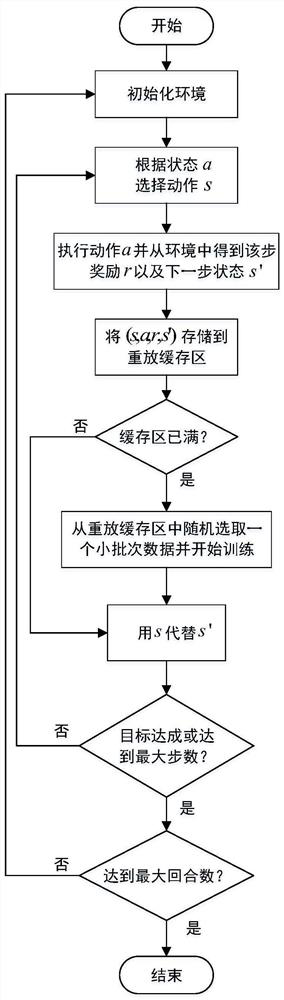
[0060] refer to figure 1 As shown, a method for constrained motion planning of a space dual-arm system based on deep reinforcement learning of the present invention, the steps are as follows:
[0061] 1) Using the generalized Jacobian matrix to establish the kinematics model of the dual-manipulator system in free-floating space;
[0062] The kinematics model of the space dual manipulator system is established according to the following formula (1):
[0063]
[0064] in, I v 0 and I ω 0 are the velocity vector and angular velocity vector of the space manipulator base in the inertial reference system, respectively; and are the velocity vector and angular velocity vector of the firs...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com