

Bionic joint type pneumatic bouncing leg
A bionic joint and pneumatic technology, applied in the field of bionic jumping robots, can solve the problems of failure to realize the jumping movement of large animals, poor controllability of dynamic parameters, insufficient controllable explosive force, etc., and achieve strong jumping ability, improved jumping ability, and reasonable structure Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
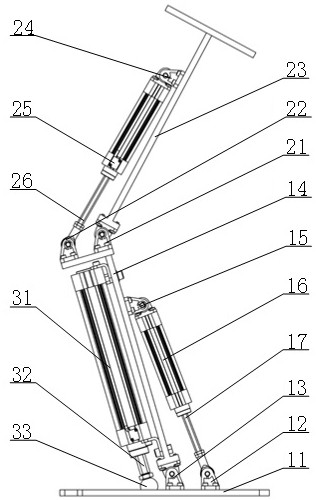
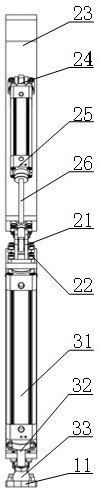
[0012] Depend on figure 1 It can be seen that a bionic joint type pneumatic bouncing leg includes an ankle joint, a knee joint and a pneumatic lower leg. It is characterized in that the ankle joint includes the foot 11 as the installation reference of each component and is in contact with the ground, and the rear ankle hinge support 12 and the front ankle hinge support 13 imitating the ankle joint of animals are respectively provided at the rear and middle. , the calf tibia 14 that rotates relative to the sole of the foot 11 around the front ankle hinge support 13, the ankle cylinder hinge support 15 that is fixedly connected to the calf tibia 14, and the ankle joint servo cylinder that rotates around the ankle cylinder hinge support 15 relative to the calf tibia 14 body 16, the ankle servo cylinder piston rod 17 that slides along the ankle joint servo cylinder cylinder 16 and rotates around the rear ankle hinge support 12 by means of pneumatic power; The rear knee hinge bear...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More