

Motion control method of cable robot and cable robot
A motion control and robot technology, applied in the motion control of cable robots, the field of cable robots, can solve problems such as cable surface damage
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0060] Embodiments of the present application provide a motion control method of a cable robot and the cable robot, so that the cable robot hardly causes damage to the cable during the movement process.
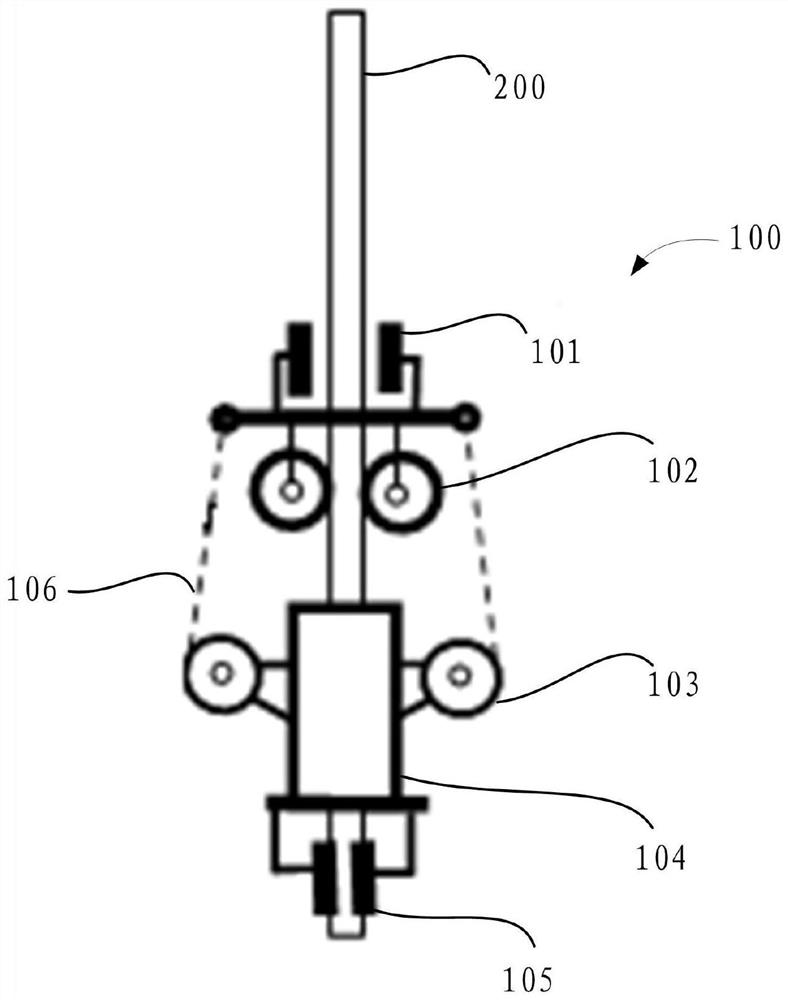
[0061] see figure 1 , the structural composition of the cable robot in the embodiment of the present application includes:
[0062] The front body, the winding mechanism 103 and the body, wherein the front body includes a first gripping mechanism 101 and a climbing mechanism 102, the body includes a second gripping mechanism 105 and a mechanism 104 for carrying a load, and the winding mechanism 103 is connected by A cord 106 connects the precursor to the body.
[0063] Wherein, the winding mechanism 103 can be arranged on the front body or on the main body. Preferably, the winding mechanism 103 is arranged on the body.
[0064] The climbing mechanism 102 may be a roller, or other mechanism capable of climbing on the cable 200 .
[0065] The first gripping mechanism 101 an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More