

AGV task allocation method, logistics sorting method and logistics sorting system
A task allocation and task technology, applied in control/regulation systems, instruments, vehicle position/route/altitude control, etc., can solve problems such as increased AGV waiting time and driving distance, system congestion, and algorithms that do not take into account flow control issues.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 2
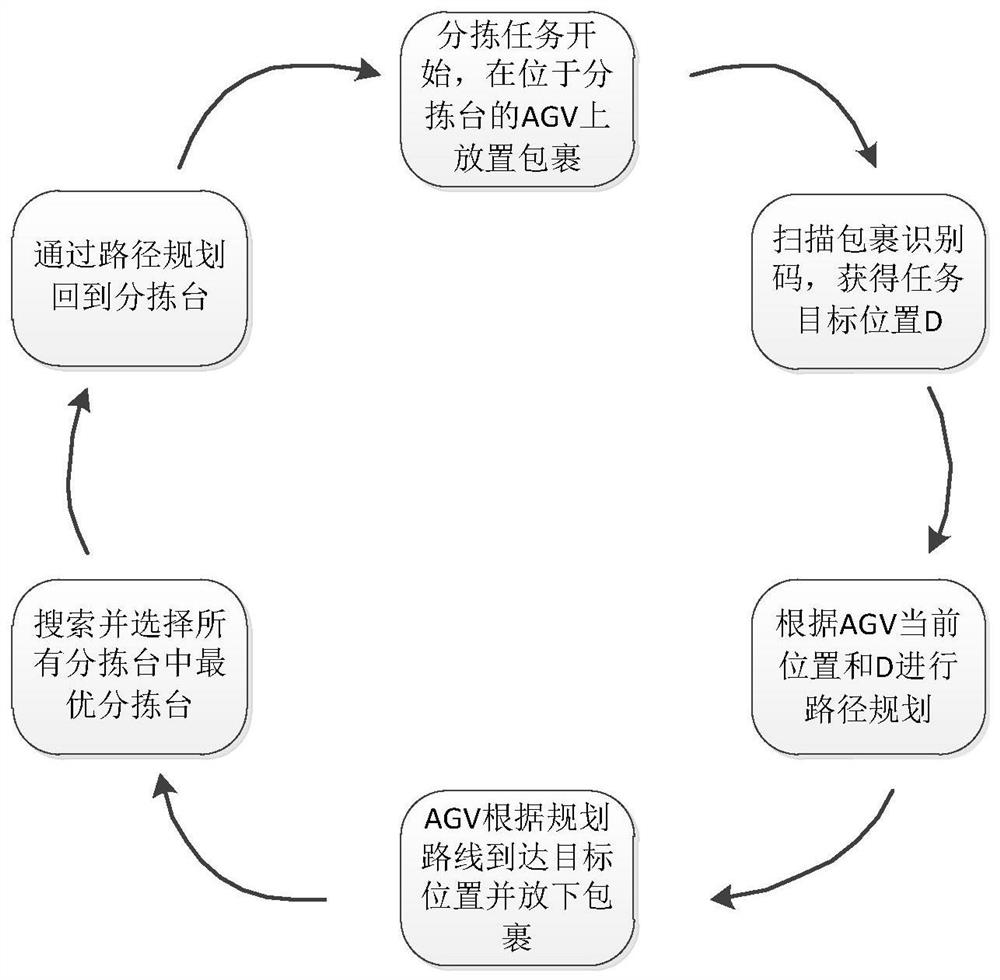
[0085] The present invention also provides a logistics sorting method. Set m as the total number of AGVs, n as the total number of tasks, and q as the total number of sorting tables, and obtain the values of m and n at regular intervals:
[0086] When the difference between the values of n and m is greater than the threshold, the first task allocation method is adopted, that is, the AGV task allocation method of the above-mentioned embodiment 1 to schedule the AGV for task delivery;
[0087] When the values of n and m are the same or the difference is not greater than the threshold, the second task allocation method is adopted, and each AGV accepts up to two tasks, and the task delivery is completed in sequence according to the time sequence of the accepted tasks as the priority. The threshold in this embodiment is set according to actual application scenarios.
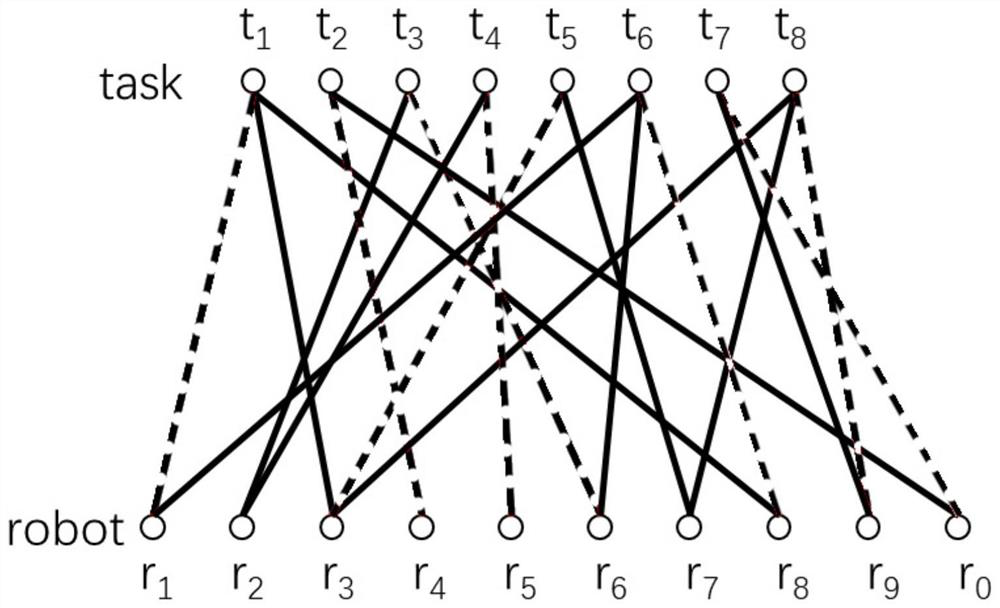
[0088] Step 1, the sorting task starts, and the KM algorithm is used to prioritize m tasks with high priori...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More