

Method for avoiding bifurcation of veins and venipuncture robot
A venous bifurcation and venipuncture technology, applied in the field of image recognition, can solve the problems of not taking into account the venous bifurcation structure, the increased risk of puncture failure, etc., to improve cognition and decision-making ability, and accurate venous bifurcation detection and avoidance results. , fast effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
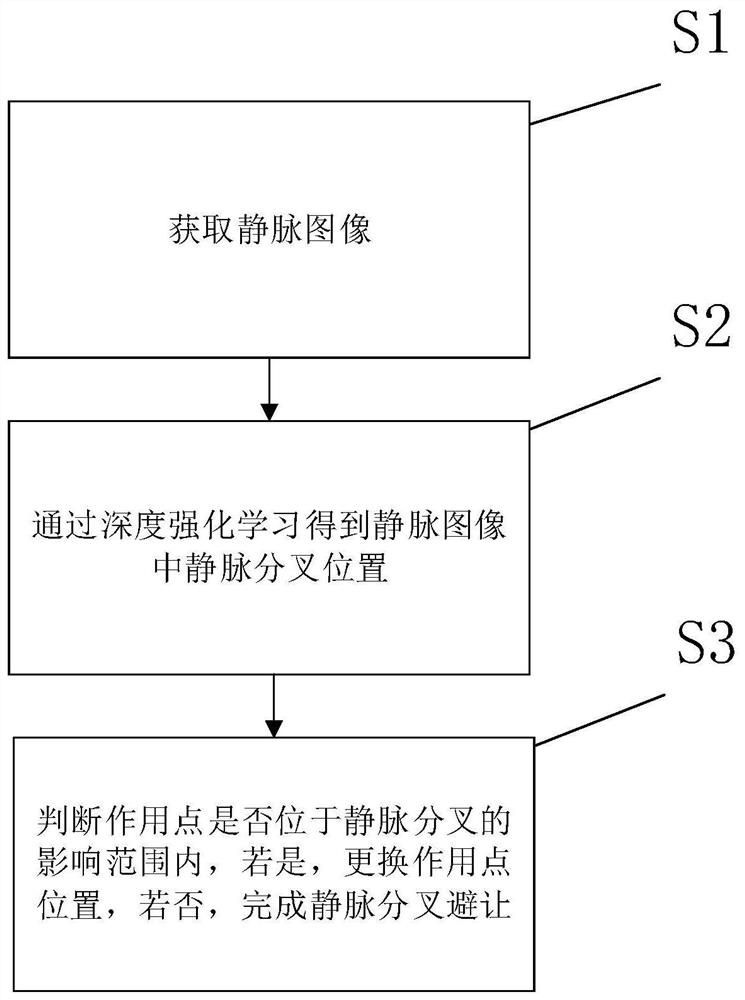
[0044] This embodiment provides a method for avoiding venous bifurcations, the method comprising:
[0045] Step S1: Obtaining vein images, the vein images are visible light images or infrared images, the visible light images are acquired by a camera, and the infrared images are acquired by an infrared camera.
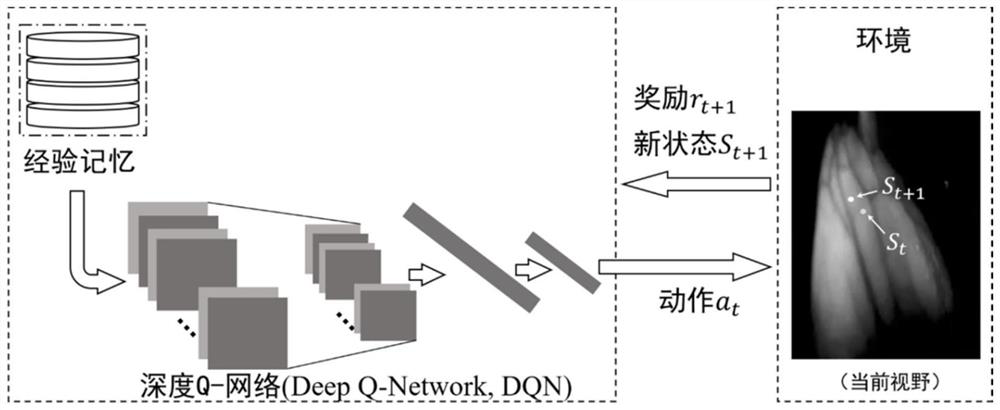
[0046] Step S2: Obtain the vein bifurcation position in the vein image through deep reinforcement learning, and the expression of deep reinforcement learning is:
[0047] Q new (S t ,A t )←Q old (S t ,A t )+α·[Q target (S t ,A t )-Q old (S t ,A t )]
[0048] Q target (S t ,A t ) = R t+1 +γ·Q max (S t+1 ,A)
[0049] Among them, Q is the state-action value function of the vein, α is the learning rate, γ is the attenuation factor, S t is the current state, A t is the action selected according to the behavior strategy, A is the action with the largest Q value selected by the greedy strategy, R t+1 To perform action A t The final reward, the size of th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More