

An Adaptive Inversion-Integral Nonsingular Fast Terminal Sliding Mode Controller Design Method
A technology of inversion integral and terminal sliding mode, which is applied in the direction of adaptive control, general control system, program control manipulator, etc., can solve the problems that the tracking performance needs to be improved, so as to avoid the chattering phenomenon, solve the singularity problem, and improve the control The effect of precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
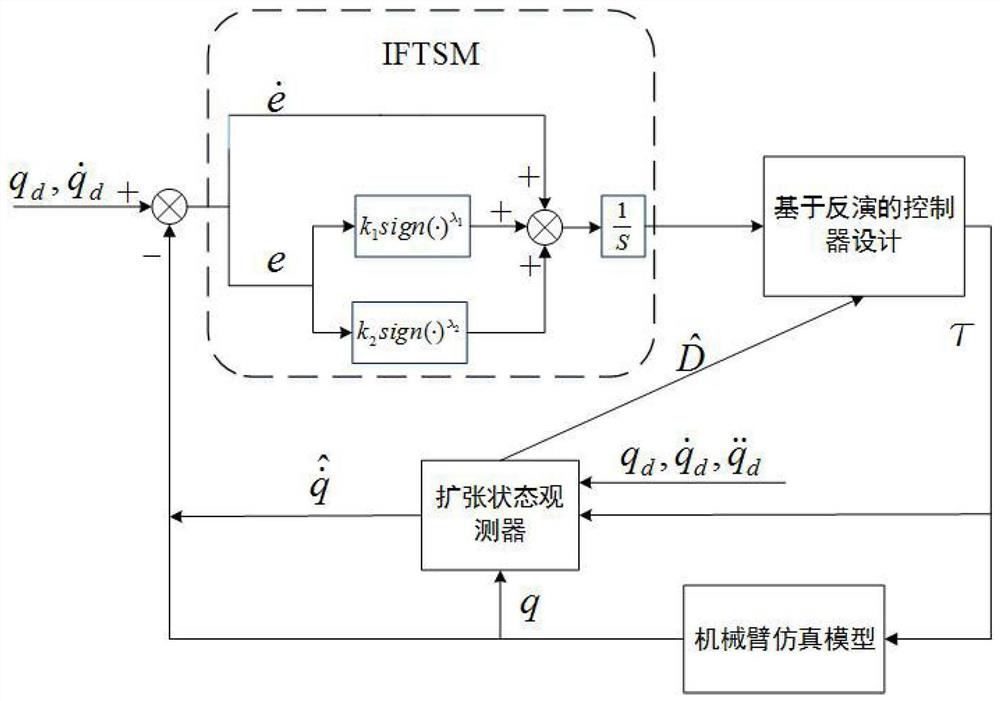
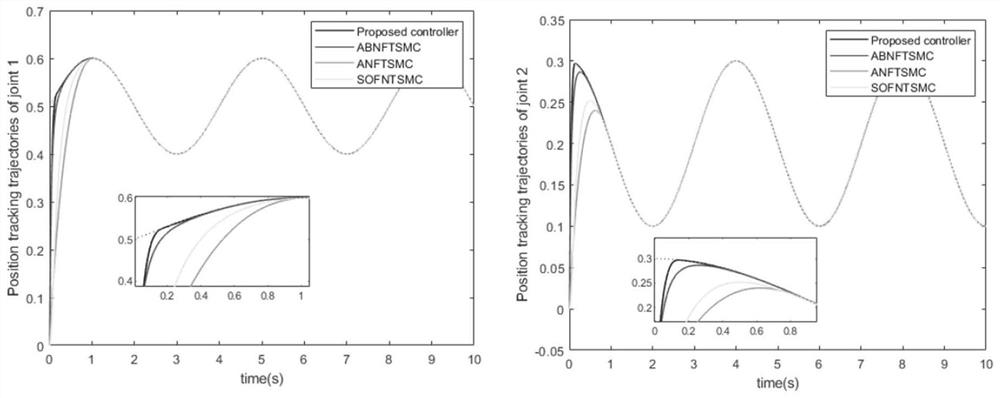
[0060] Below in conjunction with specific embodiment, further illustrate the present invention, in order to illustrate the present invention better, adopt matlab numerical simulation to verify the proposed controller, the result is as follows Figures 1 to 7 shown. Specific steps are as follows:
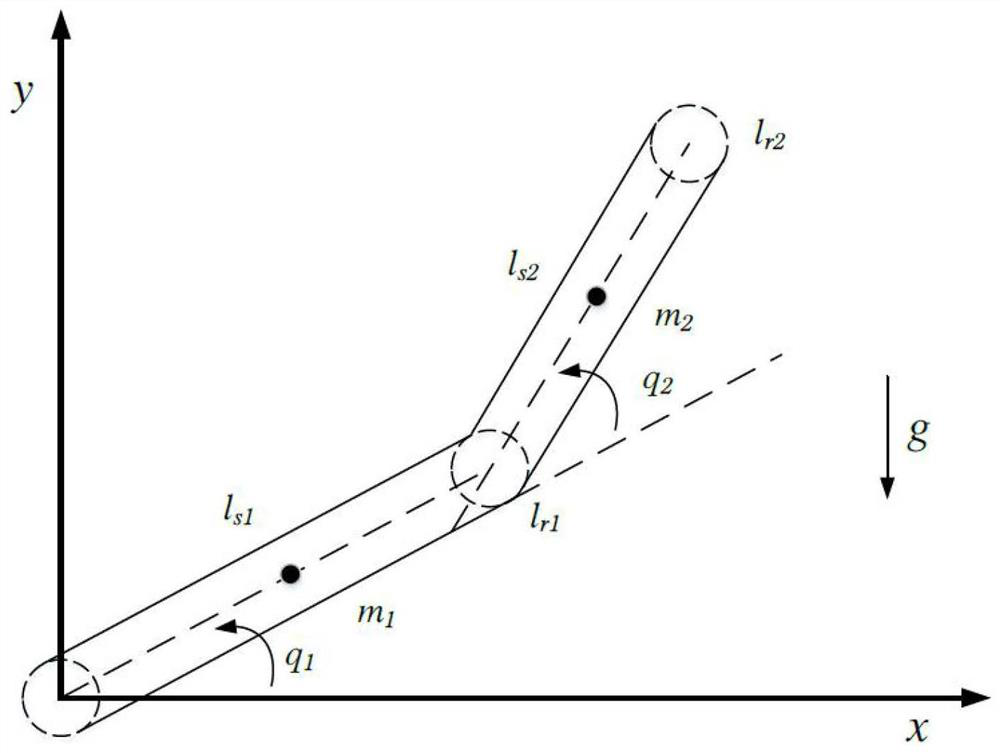
[0061] Step 1, establish a dynamic model of the manipulator including the LuGre friction model, the model is as follows:
[0062]
[0063]
[0064] In the formula Represent the position, velocity and acceleration of the joints of the manipulator, respectively. M(q)=M 0 (q)+ΔM(q) is a positive definite inertia matrix, is the matrix of centrifugal force and Coriolis force, G(q)=G 0 (q)+ΔG(q) is the gravity vector, M 0 (q), G 0 (q) is the nominal value of the system parameter, ΔM(q), ΔG(q) represents the uncertain part of the system, τ is the control input, τ d For disturbance input, is the LuGre friction torque. is the average deformation of the contact surface,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More