

A single-hole surgical robot multi-degree-of-freedom instrument assembly
A single-hole surgery and robot technology, applied in the field of medical devices, can solve the problems of independence and low sensitivity, and achieve the effect of reducing volume and independent operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be further described below in conjunction with the accompanying drawings.
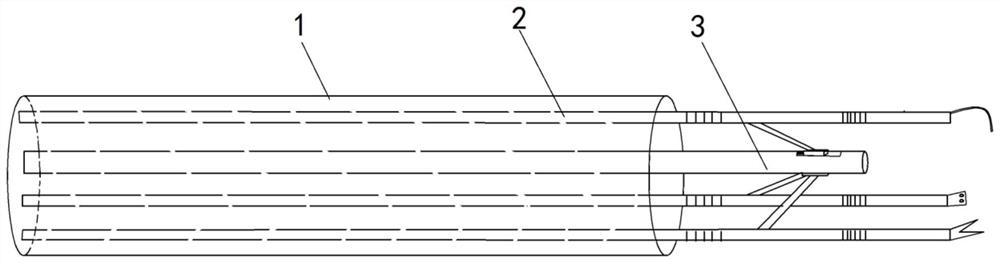
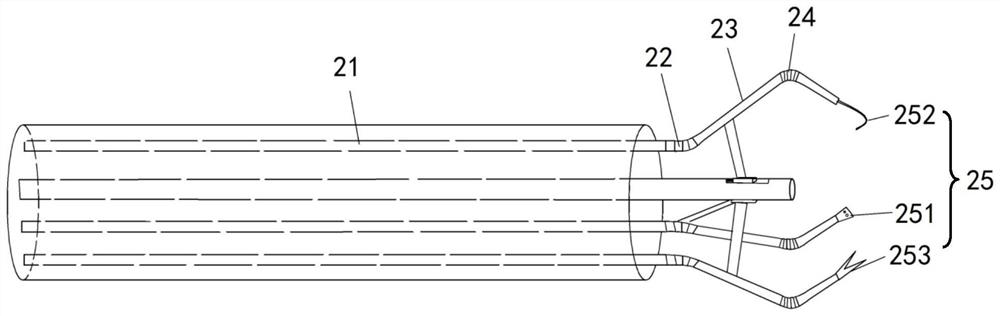
[0031] figure 1 and figure 2 Shown is a preferred single-hole surgical robot multi-DOF instrument assembly of the present invention, which includes: a catheter 1 , three surgical ends 2 , and a spreading mechanism 3 .
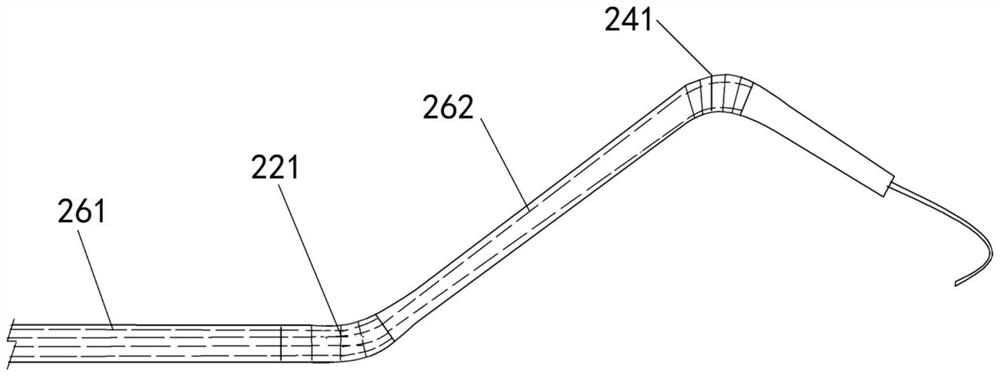
[0032] Each surgical terminal 2 is sequentially connected by the following structures from the end far from the body to the end near the body: a first rigid pipe 21 passing through the catheter 1, a first flexible pipe 22 that can be bent in all directions, a second rigid pipe 23, The second flexible conduit 24 that can be bent in all directions, the surgical instrument 25 that can be bent in all directions; the first rigid conduit 21 is passed through the conduit 1, and the first rigid conduit 21 and the second rigid conduit 23 are provided with hollow channels, The first flexible pipe 22 and the second flexible pipe 24 are respectively provided wit...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More