

Unpowered lower limb exoskeleton robot
An exoskeleton robot and lower limb technology, applied in the field of rehabilitation robots, can solve the problems of not being able to utilize energy to the greatest extent, and achieve the effects of improving utilization efficiency, reducing metabolic energy consumption, and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The following will clearly and completely describe the technical solutions in the embodiments of the present invention in conjunction with the embodiments of the present invention. Obviously, the described embodiments are only part of the embodiments of the present invention, not all of them. Based on the implementation manners in the present invention, all other implementation manners obtained by persons of ordinary skill in the art without making creative efforts belong to the scope of protection of the present invention.
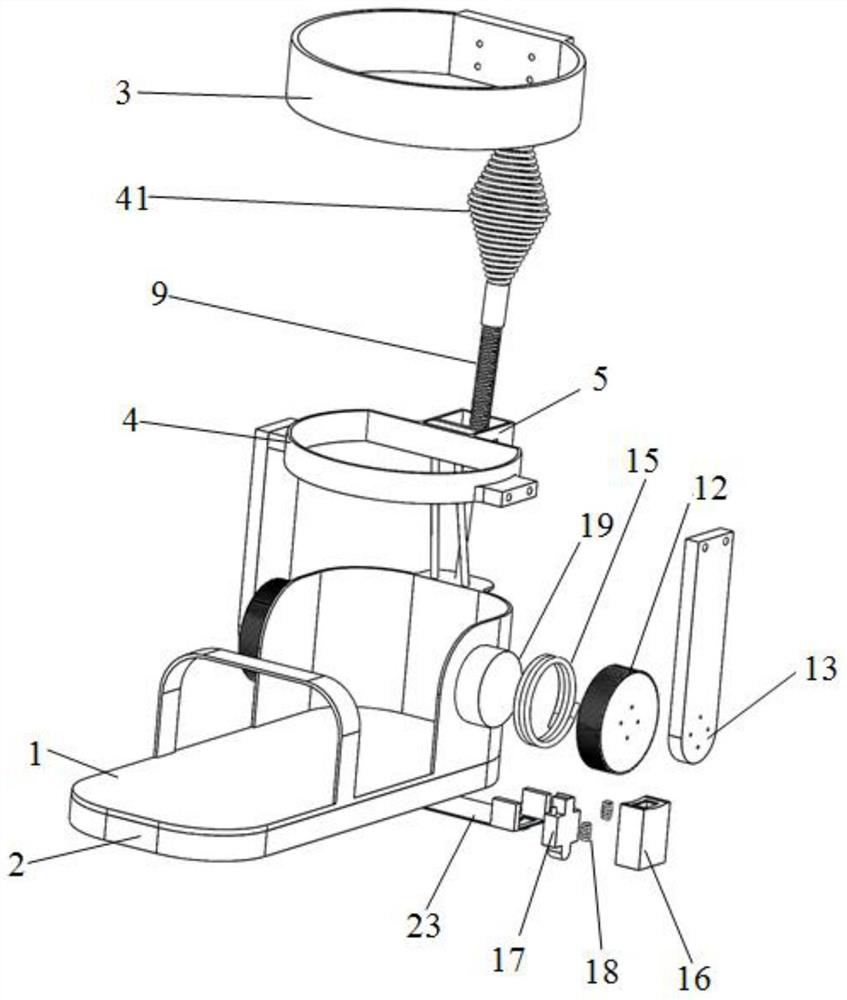
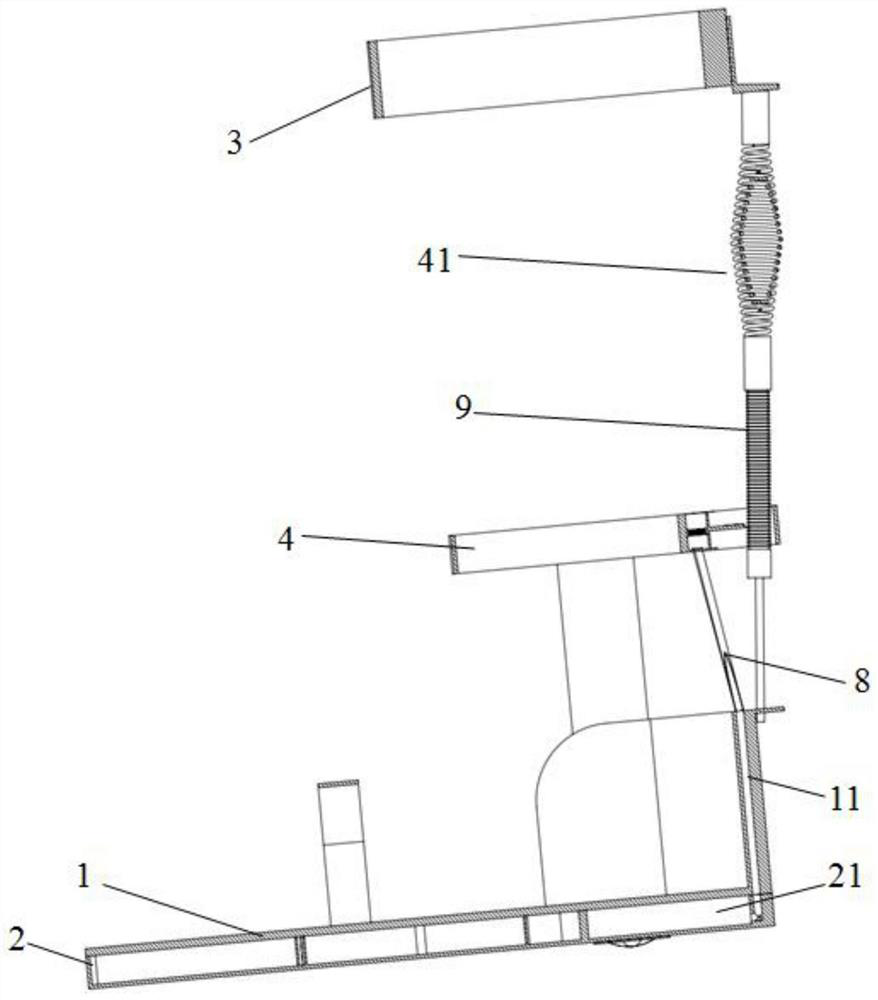
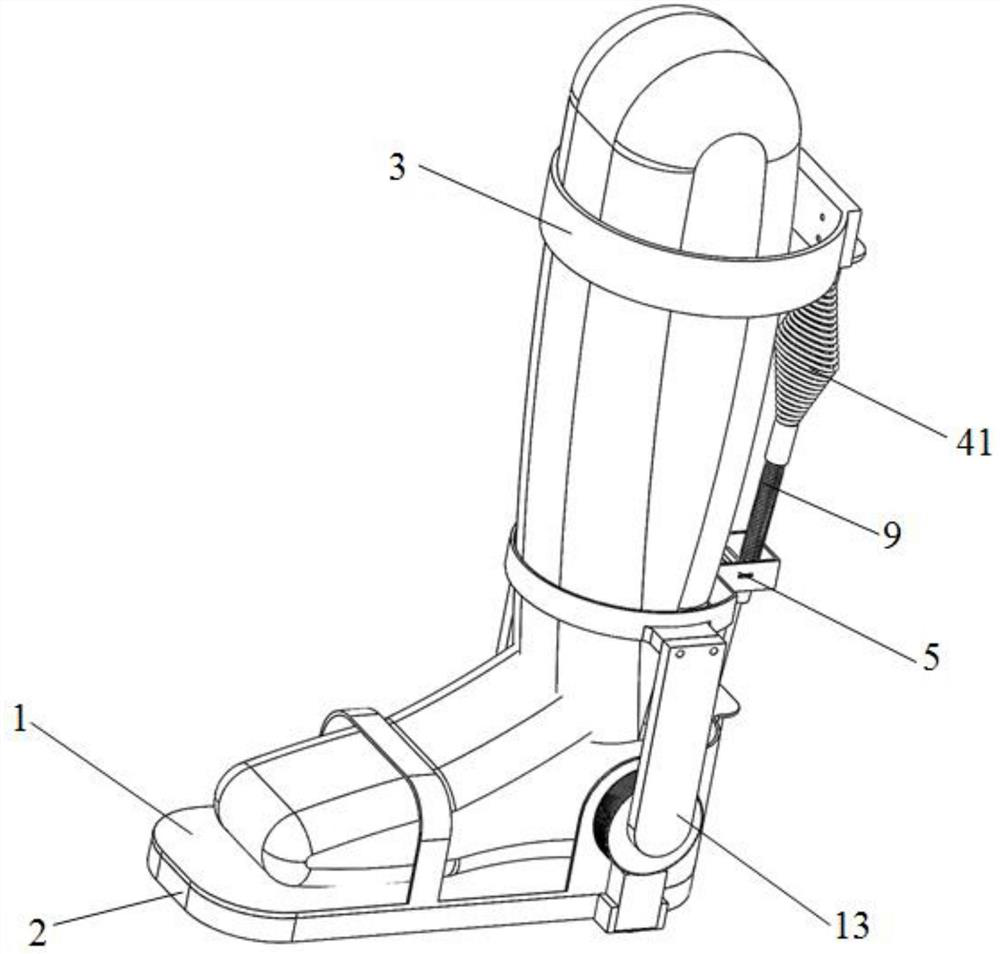
[0042] Such as Figure 1-10 As shown, an unpowered lower limb exoskeleton robot includes:
[0043] The shoe body includes a vamp 1 and a sole 2. The vamp 1 is arranged on the sole 2. A first cavity 21 is provided inside the end of the sole 2 near the heel. A channel 11 is provided on the vamp 1. The channel 11 is connected to the first cavity. Cavity 21 communicates;
[0044] Calf sheath 3, which is compatible with the human calf;
[0045]Ankle ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More