A robot teaching platform and control method applied to piano teaching
A teaching platform and manipulator technology, applied to manipulators, program-controlled manipulators, teaching aids, etc., can solve problems such as wrong playing movements, achieve the effects of correcting wrong movements, good application prospects, and simple operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
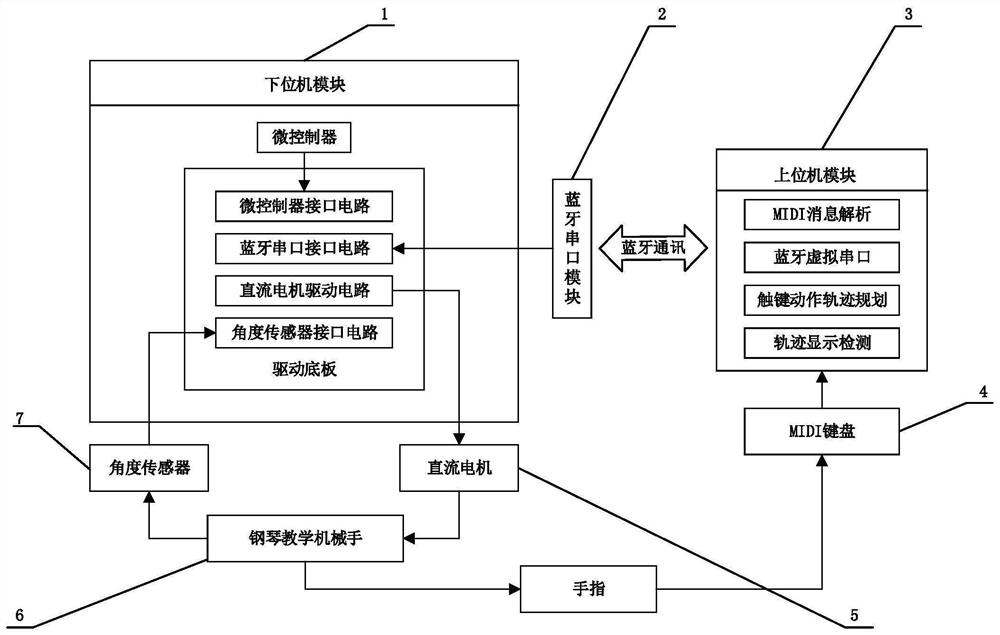
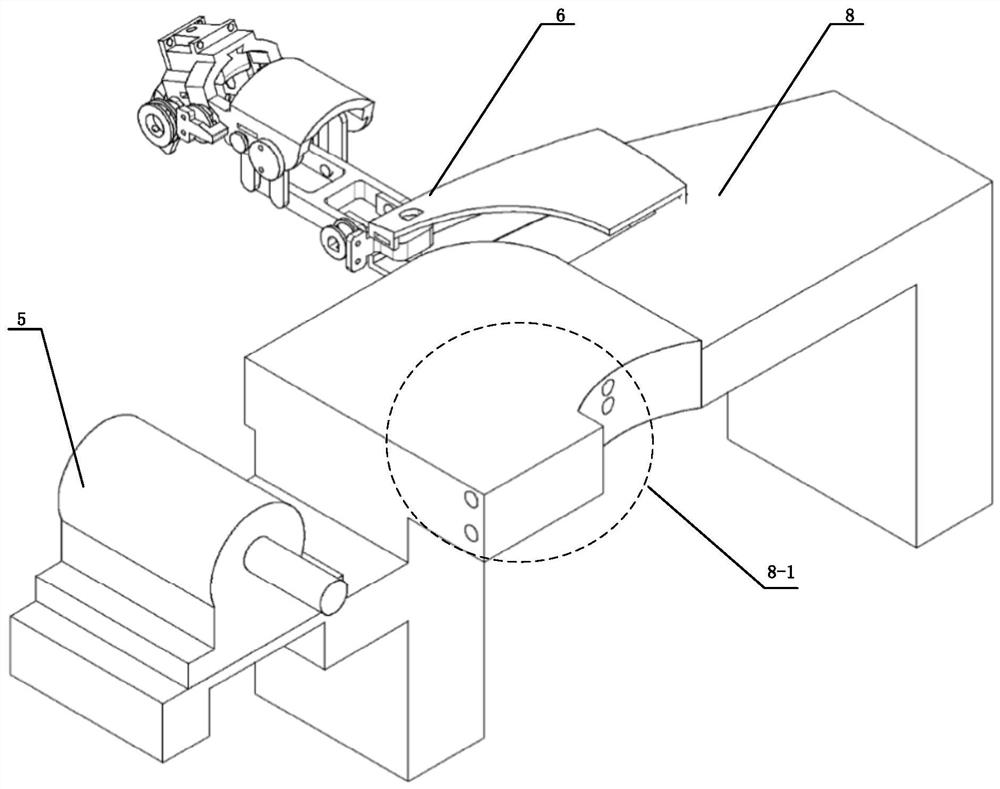
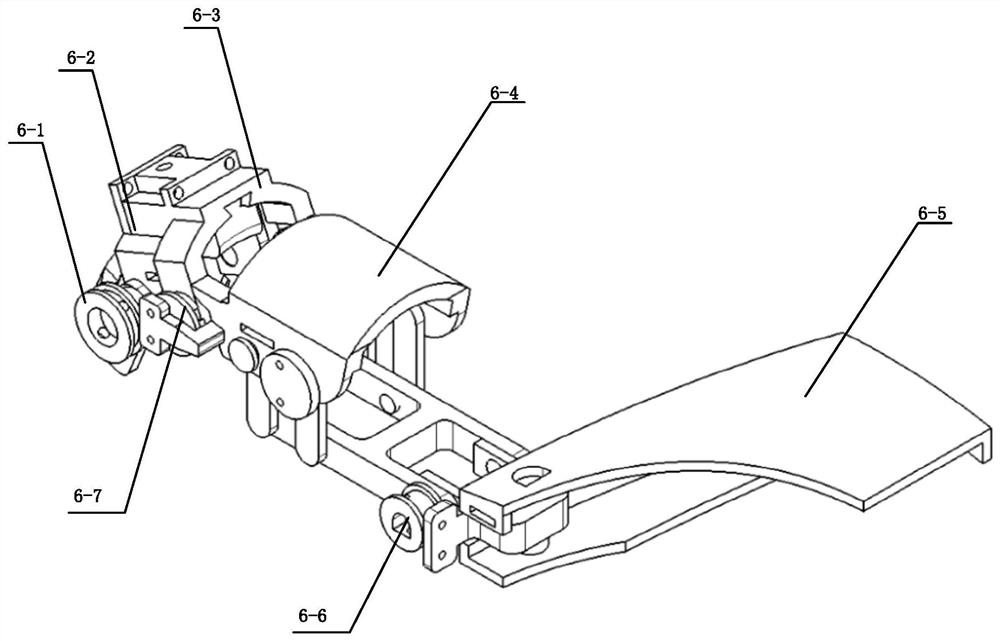
[0029] A manipulator teaching platform applied to piano teaching, comprising an angle sensor 7, a MIDI keyboard 4, a Bluetooth serial port module 2, a lower computer module 1, an upper computer module 3, a DC motor 5, a piano teaching manipulator 6 and a platform base 8.
[0030] The angle sensor 7 is installed above the metacarpophalangeal joint 6-4 of the piano teaching manipulator, and is used to detect the rotation angle information of the piano teaching manipulator 6 in real time.
[0031] The MIDI keyboard 4 is used to collect the touch force information of fingers.
[0032] The Bluetooth serial port module 2 is used for communication between the lower computer module 1 and the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More